XiaoMi-AI文件搜索系统
World File Search SystemMechatronics
604B 机电一体化试题库
(6)一条厚 7 毫米、宽 95 毫米的平带在两个以 1500 rpm/min 的速度运转的带轮之间传递动力。皮带的质量为 0.85kg/m 长,小带轮的搭接角为 155,皮带和带轮之间的摩擦系数为 025。如果皮带中的最大允许应力为 2MN/m^2,求皮带中传递的最大功率和初始张力。

机电一体化系统设计,SI 版本
限制,某些第三方内容可能会被隐藏。编辑审查认为任何被隐藏的内容不会对整体学习体验产生实质性影响。如果后续权利限制需要,出版商保留随时从此标题中删除内容的权利。有关定价、以前版本、当前版本更改和替代格式的宝贵信息,请访问 www.cengage.com/highered,按 ISBN#、作者、标题或关键字搜索您感兴趣领域的资料。
程序手册-B。eng。机电工程
学科; c)创建高质量的教材。- 毕业生将领导努力,以高道德标准实现更大的科学,工程和技术发展。2.0动手培训:以学生为中心的工业关系,以确保工程计划的行业相关性我们的教学法将与世界一流的全球最佳实践一致,该实践具有工程教育交付过程,这些实践以学生为中心,并以我们的计划教育目标驱动与行业有紧密联系。2.1计划教育目标:SST计划教育目标,将通过包括教职员工,学生,顾问委员会成员,校友和毕业生雇主在内的所有主要利益相关者的全部参与,定期审查。目前,我们的课程正在为毕业生准备在毕业3 - 5年之内的职业和专业成就,是:

提供机电一体化的体验学习机会
新兴的机电一体化技术领域着重于开发和实施用于工业应用的先进自动化。因此,机电一体化包括高级领域,包括机器人技术,人工智能(AI)和网络安全。尽管对机电一体化专业知识的需求正在增长,但机电一体化的可用体验劳动力发展机会仍然有限。该项目将通过在线机电一体化教育门户网站(MEP),体验式机电一体化实践(MP)计划和机电一体化行业途径轮换来研究和开发教育材料和工具,并为项目参与者提供体验机会。MEP和MP模块专注于机器人技术,力学,电子/控制,网络安全和人工智能的五个机器人支柱。该项目利用密歇根州技术大学,西岸社区学院,戈吉比克社区学院,三个非营利组织以及九个地区行业合作者之间的合作伙伴关系。主要项目目标是通过体验式学习机会来改善跨学科的机电一体化培训;制定一个灵活而全面的计划,以促进多样化和包容性的STEM劳动力:并促进以机电卫星劳动力准备和安置为中心的项目合作伙伴之间的可持续合作。作为机电一体化教育门户网站的项目研究和开发的一部分,正在开发允许进行远程机器人操作和编程的遥控机器人工作电脑(TRW)。TRW由FANUC协作机器人,三个用于对用户实时反馈的摄像机和一个用于托管已开发软件的计算机服务器。客户端的界面将由虚拟教学吊坠组成,其中包含一个覆盖的真实教学吊坠的显示屏幕和两个显示窗口,显示了由安装在物理机器人工作表中的摄像机传递的不同角度的机器人。TRW将通过安全环境中的Internet从世界任何地方的用户远程访问机器人。在本文中,作者提供了TRW的研发阶段的详细信息。
机器人技术学士学位学士学位
1)一般计划演讲将以机器人和机器人技术工程学理学学士学位(RME)毕业,这需要成功完成总计132个学分时间(CH)。这些学分时间分布在不同的要求上,包括必不可少的课程以及可以根据流偏爱选择的课程。下表显示了132个学时的分配方式:
工程学士学位(荣誉)(机器人和机电学)BH-erm
所有硕士,学位,文凭和基金会课程的学生将在第一学期自动注册参加学术完整性培训模块(注意:预计从基金会研究中阐明的学生有望将本单元作为复习进行。该在线模块中有4个主题,建议在您开始学习期的第1-4周完成。在此模块结束时,要求学生完成由10个问题组成的测验,并取得至少90%的分数。
M2-机器,机器视觉和人工智能
- 虚拟和混合现实3 ects-图像和视频程序。3 ects-计算机视觉状态3 ects-非常规摄像机的计算机愿景3 ects-更新学习3 ects -3D数据分析3 ects -International Keynote Speaker 1 ECTS 1 ECTS-战略与业务发展1.5 ECTS 1.5 ECTS -FLE 1.5 ECTS -CHOIX

太阳能跟踪系统的机电一体化设计 - Inpressco
摘要 机电一体化系统设计的关键要素是从设计过程一开始就在整个设计过程中同时进行多学科知识的协同集成、建模、仿真、分析和优化,并针对更高的性能、速度、精度、效率、更低的成本和功能等约束,从而产生具有更多协同作用的产品。本文提出了基于机电一体化设计方法的智能太阳能跟踪系统的构想和开发,使得太阳能电池板在白天和季节变化中都能准确垂直于阳光光束(准确指向太阳),光照最强。整个系统和子系统同时进行选择、设计、集成建模、测试和优化;此外,还针对不同输入类型(包括实际输入高度角)验证了整体系统响应。所得结果表明设计的简单性、准确性和适用性,可以满足所有设计要求。所提出的设计可用于研究或教育目的。关键词:机电一体化设计,太阳跟踪器,建模/仿真。1.简介 1 机电一体化系统设计过程可分为系统、简单和清晰的设计步骤,包括:问题陈述;概念设计和功能规范;系统和所有子系统的并行(并发)设计和整体集成,包括:机械、电子、软件、控制单元、控制算法和接口子系统的选择、设计和协同集成;建模和仿真;原型设计、测试和优化;最后是制造和商业化(Farhan A. Salem 等人,2013 年)(Yu Wang 等人 2012 年)(Devdas Shetty 等人,2011 年)(Sarah Brady,2008 年)(L. Al-Sharif,2010 年)。本文提出了基于机电一体化设计方法的智能太阳能跟踪系统的构想和开发。2.预研究过程-问题陈述。在可再生能源中,太阳能是可持续能源最基本和先决条件的资源,因为它无处不在、丰富且
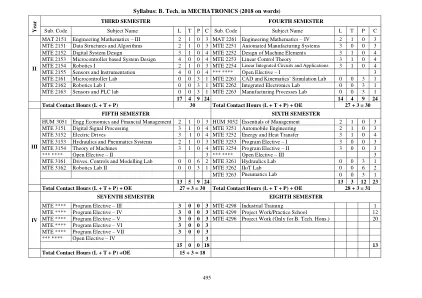
教学大纲:机电一体化技术学士学位(2018 字)
向量微积分:梯度、散度和旋度,它们的物理意义和恒等式。线、表面和体积积分。格林定理、散度陈述和斯托克斯定理、应用。傅里叶级数:周期函数的傅里叶级数、欧拉公式。奇函数、偶函数和任意周期函数的傅里叶级数。半程展开。傅里叶积分。正弦和余弦积分、傅里叶变换、正弦和余弦变换。谐波分析。偏微分方程:基本概念、仅涉及一个变量的导数的方程解。通过指示变换和变量分离求解。用分离变量法推导一维波动方程(振动弦)并求其解。达朗贝尔波动方程解。用高斯散度定理推导一维热方程并求一维热方程解。用分离变量法求解。数值方法:一阶和二阶导数(常导数和偏导数)的有限差分表达式。边界值问题的解,二阶偏微分方程的分类。用标准五点公式求拉普拉斯和泊松方程的数值解,用显式方法求热和波动方程的数值解。参考文献: 1.Kreyszig, Erwin,《高级工程数学》,John Wiley & Sons,(第 5 版),2010 年。2.3.S. S. Sastry,《数值分析入门方法》(第 2 版),1990 年,Prentice Hall。B. S. Grewal,《高等工程数学》,1989 年,Khanna Publishers 4。Murray R. Spiegel,《矢量分析》,1959 年,Schaum Publishing Co.

MREN的夏季工作机会410机器人和机器人工程课程的开发代表新的机器人和机器人工程
MREN 410机器人和机器人工程课程的夏季工作机会代表新的机器人和机器人工程(MRE)计划,工程和应用科学学院将雇用一个学生来协助为新课程开发和测试新课程的新课程:MREN 410 410自动级别的系统<最初是 该课程的目的是为学生提供有关在不确定条件下思考,学习和行动的机器人和智能机器设计和分析方法的工作知识。 主题包括机器视觉,机器学习和识别,决策及其在自主系统设计中的应用的基本原理和方法。 成功的候选人将是:该课程的目的是为学生提供有关在不确定条件下思考,学习和行动的机器人和智能机器设计和分析方法的工作知识。主题包括机器视觉,机器学习和识别,决策及其在自主系统设计中的应用的基本原理和方法。成功的候选人将是: