XiaoMi-AI文件搜索系统
World File Search SystemNMPC
人形机器人 Pyrène 的反应性步行
2 背景——实习开始时的最新水平 9 2.1 人形机器人行走:运动背后的方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 2.2 求解方程:控制方案的实施 . ... . . . . . . . . . . 19 2.3.1 通过控制发散运动分量进行接触扳手控制 20 2.3.2 全身导纳控制:CoM 策略 . . . . . . . . . . 21 2.4 实习目标 . . . . . . . . . . . . . . . 21 2.5 一般方法 . . . . . . . . . . . . . .... .... .... .... .... .... 22

非线性MPC设计用于增量ISS系统,并应用于GRU网络✩
本简介介绍了非线性模型预测控制(NMPC)策略的设计,以增量输入到状态稳定(ISS)系统。特别是设计了一种新颖的公式,这不必繁重的终端成分计算,而是依赖于最低预测范围的明确定义,以确保闭环稳定性。设计的方法特别适合通过复发性神经网络(RNN)学习的系统,该系统以增强的建模功能而闻名,并且可以通过简单的代数条件来研究增量ISS的属性。该方法应用于封闭式复发单元(GRU)网络,还提供了设计具有收敛保证的量身定制状态观察者的方法。在基准系统上测试了最终的控制体系结构,以证明其良好的控制性能和有效的适用性。©2023 Elsevier Ltd.保留所有权利。

一种非线性模型预测控制策略,用于秤车的自主赛车
摘要 - 本文介绍了旨在控制用于自主赛车竞赛的小型汽车模型的非线性模型预测控制(NMPC)策略。拟议的控制策略涉及将车辆时间最小化,同时将车辆保持在轨道边界范围内。优化问题考虑了车辆的致动极限以及作用于Pacejka魔法公式和简单传动系统模型的汽车上的侧面和纵向力。此外,该方法允许在静态障碍物填充的轨道上安全地竞争,从而产生无冲突的轨迹并跟踪它们,同时增强膝盖正时性能。使用F1/10模拟器的凉亭模拟展示了拟议的控制策略的可行性和有效性。该代码作为开源释放,使得可以复制获得的结果。索引术语 - 非线性模型预测性控制,Au au sopos Racing,F1/10模拟器,自动驾驶汽车导航。
物理信息的神经网络建模和区域供暖系统的预测控制
摘要 - 本文介绍了基于数据的建模和最佳区域供暖系统(DHSS)。此类大规模网络系统的物理模型受复杂的非线性方程的控制,需要大量参数,从而导致其操作的潜在计算问题。因此提出了一种新颖的方法,利用操作数据和可用的物理知识,以获得准确且计算有效的DHSS动态模型。拟议的想法包括利用多个反复构建的神经网络(RNN)以及将DHS网络的物理拓扑嵌入其互连中。在标准RNN方法方面,所得的模型方法(表示为物理知识的RNN(PI-RNN)),即使利用了减少尺寸的模型,也可以实现更快的训练程序和更高的建模准确性。开发的PI-RNN建模技术为设计非线性模型预测控制(NMPC)调节策略铺平了道路,从而使计算时间有限,以最小化生产成本,提高系统效率并提高系统效率并尊重整个DHS网络的操作约束。在文献中引用的DHS基准的模拟中测试了所提出的方法,从建模和控制角度显示了有希望的结果。

航空的实时合作轨迹计划 -
空中系统系统的抽象合作轨迹计划是一个基本且具有挑战性的问题,旨在利用航空信息来协助地面任务。现有方法通常遭受次优轨迹或计算负担。在本文中,我们讨论了空中系统的合作轨迹计划,在该系统中,无人接地车辆(UGV)在无人驾驶汽车(UAV)的协助下实时计划其当地轨迹。首先,UAV使用非线性模型预测控制(NMPC)生成指导轨迹,该模型将障碍物分布密度视为反映多个障碍对UGV的耦合效果的因素,从而避免了局部最小值问题并改善了计划轨迹的可行性。其次,采用基于空空间的行为控制(NSBC)框架将指导轨迹合并到UGV自己计划的任务中。最后,为UGV开发了一个事件触发任务主管,以决定所有任务的优先级,这降低了传统基于规则的任务主管带来的任务优先级的切换频率。模拟和实验结果都表明,就轨迹误差,在线计算时间和任务执行的成功率而言,所提出的方法具有出色的轨迹计划性能。
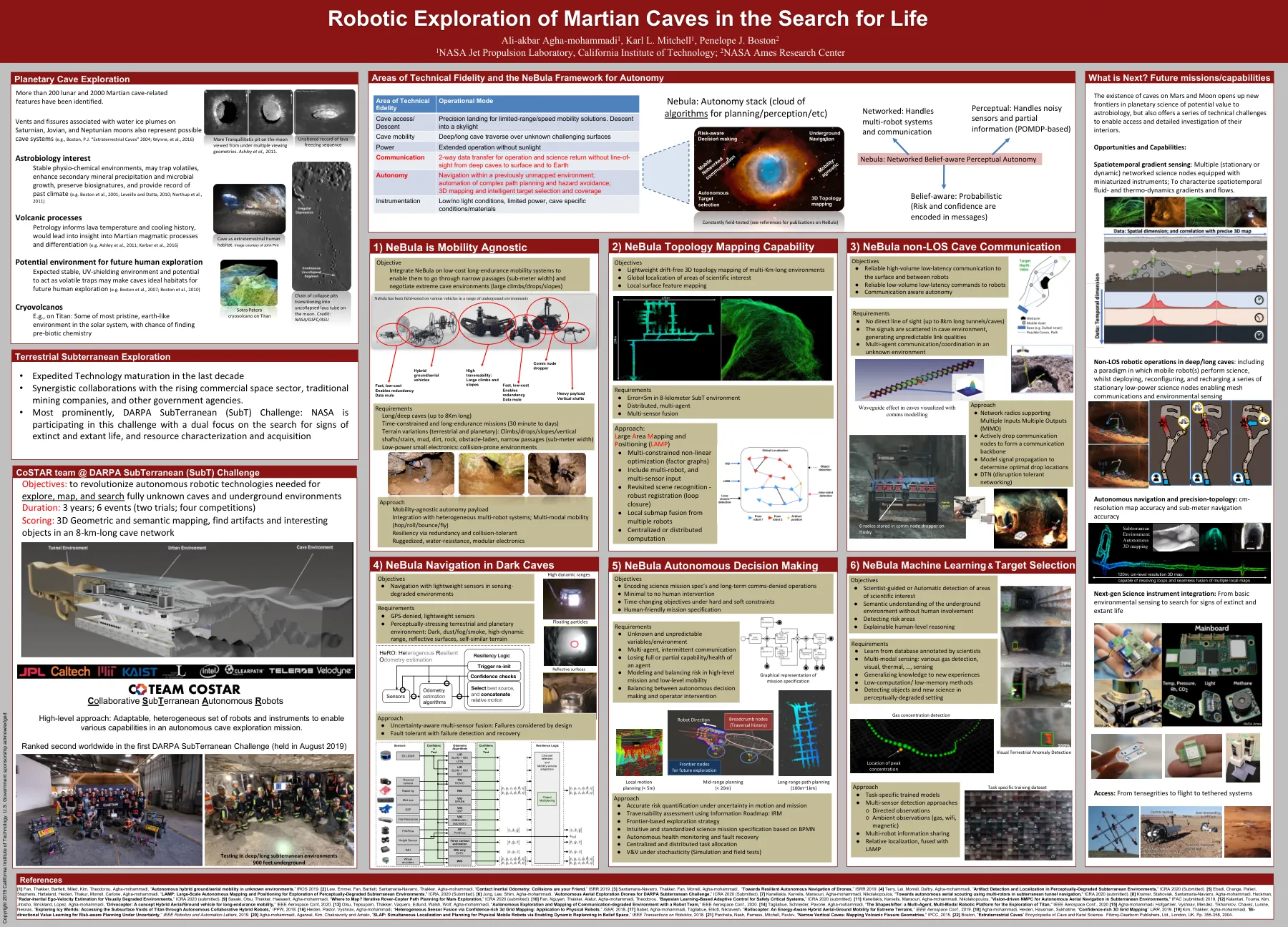
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。