XiaoMi-AI文件搜索系统
World File Search SystemNagendra

K. Nagendra Prasad,Shaik Khamruddin,Sampangi Srinivas,V。Pavan,E。Surendar,Udayakiran,“金属传感器的设计和制造A
该机器人旨在穿越各种地形,检测金属对象,并提供实时视频流,用于远程监视和监视应用程序。全地形机器人配备了坚固的底盘和坚固的车轮,以确保跨不同表面的有效运动,包括粗糙的地形,砾石,沙子,沙子和不均匀的景观。纳入机器人的高扭矩电动机系统使其能够轻松克服障碍物和陡峭的倾斜度,从而确保在具有挑战性的环境中可靠的性能。为了驱动机器人的机能系统中使用的高扭矩电动机,使用了10A拉丝电机驱动器。该电机驱动器提供了必要的功率和控制信号,以有效地驱动电动机,从而确保机器人的精确运动和可操作性。10A刷子驱动器提供了强大的性能和保护功能,从而保护电动机免受过电流或电压异常的影响。为了促进金属检测,机器人配备了专用传感器系统,能够检测其附近的金属物体。此传感器系统利用电磁原理来识别和定位金属目标,提供有关此类物体的存在和大致位置的宝贵信息。金属检测能力通过实现诸如搜索和救援,考古探索和工业检查等应用来提高机器人的多功能性。此外,全地形机器人配备了实时流媒体功能,该功能允许实时视频传输到远程位置。此功能使用户能够远程监视机器人的周围环境和活动,从而在各种情况下提高情境意识并促进决策。通过集成无线通信技术,实现了实时流媒体功能,从而使视频数据通过网络连接无缝传输。
底物诱导的大面积单层MOS 2 Ashish Soni 1,2,Nagendra S. Kamath 1,2,Yun-Yang Shen 3,
二维(2D)过渡金属二分法(TMD)的内在特性受其界面条件的深刻影响。工程TMD/底物接口对于在设备应用中利用2D TMD的唯一光电特性至关重要。这项研究深入研究了单层(ML)MOS 2的瞬态光学特性如何受底物和膜制备过程的影响,特别是集中在光激发载体的产生和重组途径上。我们的实验和理论分析表明,转移过程中诱导的应变和缺陷在塑造这些光学特性中起关键作用。通过飞秒瞬态吸收测量值,我们发现了ML MOS 2中载体捕获过程的底物改变的影响。此外,我们研究了激子 - 外激体歼灭(EEA),表明EEA速率随不同的底物而变化,并且在低温(77 K)时会显着降低。这项研究为通过战略接口工程定制TMD的光电特性铺平了道路,有可能导致创建高效的电子设备,例如光电记忆,光发射二极管和光电探测器。
Yelisetty Venkata Suseela
• Y. V. Suseela , P. Sengupta, T. Roychowdhary, S. Panda, S. Talukdar, S. Chattopadhyay, S. Chatterjee and T. Govindaraju, Targeting Oncogene Promoters and Ribosomal RNA Biogenesis by G-Quadruplex Binding Ligands Translate to Anticancer Activity (Cover article), ACS Bio & Med Chem Au , 2 (2),125-139(2022)。•Y. V. Suseela,P。Satha和T. Govindaraju,通过基于黄酮的转交近红外转子探针(封面)(分析和传感),1(4),180-187(20211),通过基于黄酮的近红外转子探测器对G-四链体的识别。•Y. V. Suseela,P。Satha,N。A。Murugan和T. Govindaraju,通过混合结合而识别G- Quadruplex拓扑,与癌症Theranostics的影响,Theranostics,23,10394-10414(2020)(2020年)(2020)(2020年)(新闻亮点)•Y. V. v. suseela,n。 Govindaraju,规范和非规范核酸结构的远红荧光探针:当前的进步和未来影响,化学。Soc。Rev.,47,1098-1131(2018)。 •S。Pratihar,Y。V. Suseela和T. Govindaraju,螺纹介导器诱导的纳米浓度以及内源金属离子在DNA递送中的脱谐解中的作用,ACS Appl。 Bio Mater。,3,6979-6991(2020)•K。Pandurangan,B。Roy,K。Rajasekhar,Y。V. Suseela,P。Nagendra,P。Nagendra,A。Chaturvedi et.Al。 Bio Mater。,3,5,3413–3422(2020)。 •N。Narayanaswamy,R。R. R. Nair,Y。V. Suseela,D。K. Saini和T. Govindaraju,基于分子信标的DNA开关,用于在囊泡和活细胞中可逆的pH传感,化学。 Commun。,52,8741-8744(2016)。 ,54,6314-6318(2013)。Rev.,47,1098-1131(2018)。•S。Pratihar,Y。V. Suseela和T. Govindaraju,螺纹介导器诱导的纳米浓度以及内源金属离子在DNA递送中的脱谐解中的作用,ACS Appl。Bio Mater。,3,6979-6991(2020)•K。Pandurangan,B。Roy,K。Rajasekhar,Y。V. Suseela,P。Nagendra,P。Nagendra,A。Chaturvedi et.Al。 Bio Mater。,3,5,3413–3422(2020)。 •N。Narayanaswamy,R。R. R. Nair,Y。V. Suseela,D。K. Saini和T. Govindaraju,基于分子信标的DNA开关,用于在囊泡和活细胞中可逆的pH传感,化学。 Commun。,52,8741-8744(2016)。 ,54,6314-6318(2013)。Bio Mater。,3,6979-6991(2020)•K。Pandurangan,B。Roy,K。Rajasekhar,Y。V. Suseela,P。Nagendra,P。Nagendra,A。Chaturvedi et.Al。Bio Mater。,3,5,3413–3422(2020)。•N。Narayanaswamy,R。R. R. Nair,Y。V. Suseela,D。K. Saini和T. Govindaraju,基于分子信标的DNA开关,用于在囊泡和活细胞中可逆的pH传感,化学。Commun。,52,8741-8744(2016)。 ,54,6314-6318(2013)。Commun。,52,8741-8744(2016)。,54,6314-6318(2013)。•Y. V. Suseela,S。Das,S。K。Pati和T. Govindaraju,基于DNA的基于咪唑基萘二二酰亚胺的螺纹介导剂,Chembiochem,17,2162-2171(2016)。•Y. V. Suseela,M。Sasikumar,T。Govindaraju,使用Tribromoosococolicacy Acid,Tetrahedron Lett的有效和区域选择性溴化。•M。Sasikumar,Y。V。Suseela和T. Govindaraju,Dibromohydantoin:一种方便的溴化试剂,适用于1,4,5,8 - 萘二甲乙烯二羧酸二乙二醇二氢化盐(COPERCE TRECT),ASIAN J. ORG。Chem,2,779-785(2013)。

学校科学
Sunita Farkya 教授,DESM,NCERT,新德里 Ashok Kumar Shrivastava 教授,名誉教授,Netaji Subhash 科技大学(前身为 NSiT),新德里 BB Khare 教授(已退休),贝拿勒斯印度教大学 DS Rawat 教授,化学系,德里大学 Hukum Singh 教授(已退休),DESM,NCERT,新德里 Nagendra Kaushik 教授,电气与生物物理系和等离子体生物科学研究中心,光云大学,首尔 Shailendra Goel 教授,德里大学植物学系 Siddharth S. Saxena 首席研究助理,学术,剑桥大学卡文迪什实验室物理系 Vidyanand Nanjundiah 教授(已退休),印度理工学院,班加罗尔 现任教授,人类遗传学中心,班加罗尔 编辑委员会
课程 - 2014年(C-14)土木工程文凭
技术教育和培训委员会,在技术教育部宙斯盾下的Telangana,Telangana通常每五年一次审查课程。但是,董事会认识到用户行业所陈述的不断变化的需求,因此决定提出课程的修订。因此,董事会在C. Nagendra Rao教授的指导下,在钦奈Nitttr的协助下,对C-09有效的C-09课程进行了评估。有关查找C-09课程的优点和缺点,该教师对必须带来的课程更改进行了彻底评估。人们认为,迫切需要改善追求文凭课程的学生的实践经验。此外,用户行业的反馈和建议也强调了增强英语沟通能力的紧迫性。认为这些会议和州一级举行了许多会议和审议,该部门的专家,学术界和该系高级学院的专家。新的文凭课程的新课程是由教师教学成员在Telangana的理工学院的积极参与设计的,此外还由专家委员会与著名院士组成的专家委员会进行了审查。
使用机器学习预测遗传疾病...
5 Nagendra R 1234 B.E学生,CSE系,M Visvesvaraya爵士,印度班加罗尔VTU的M Visvesvaraya爵士,5 CSE,M VISVARAYA爵士,VTU爵士,VTU,VTU爵士,印度孟加拉罗尔,印度孟加拉罗尔爵士:遗传疾病:遗传性疾病呈现其复杂性的遗传性挑战。该项目旨在使用机器学习来开发一种预测模型,以鉴定基于遗传信息的遗传疾病风险。它从来自已知疾病和健康对照的个体的基因组数据的多样化数据集开始。预处理技术增强了数据集,然后使用SVM,随机森林和神经网络等算法进行培训和评估模型。特征重要性分析标识关键标记。模型通过交叉验证进行微调以符合鲁棒性。这项研究进步了预测医学,为早期疾病鉴定提供了一种工具,可能会彻底改变遗传筛查并改善患者的结果。

Chaitanya Bharathi技术学院
❖教授B.Mahadevan IIM,孟加拉国荷库尔博士Anuradha Choudry博士,IIT Kharagpur,协调员 - iks-aicte,Moe,Moe,Goi,Goi,Goi,Vinayak Rajat Bhat博士孟买❖AV Narasimha Rao博士,RTD。.professor cbit; Pi-RC-IKS-SB-Telangana❖Ashwani Kumar Sharama博士,部生物技术; RVCE-BENGALURU❖小组成员UGC-AICTE,Moe,Goi,Sri Sri University,Cuttack,Cuttack,Odisha❖Brig博士Brig博士。Jeevan Raja Purohit;斋浦尔,拉贾斯坦邦❖助理。教授,CSIS,BITS PILANI,HYDERABAD CAMPUS❖浦那副教授Venkateswara Pai博士,Pune❖SRI。S. G. Raghavendra Prasad,部 信息科学与工程。 ; RVCE-Bengaluru谁可以参加?S. G. Raghavendra Prasad,部信息科学与工程。; RVCE-Bengaluru谁可以参加?
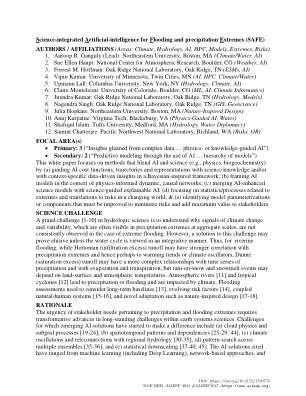
洪水和降水极端事件的科学综合人工智能(SAFE)
1. Auroop R. Ganguly(负责人):东北大学,马萨诸塞州波士顿(气候/水,AI) 2. Sue Ellen Haupt:美国国家大气研究中心,科罗拉多州博尔德(天气,AI) 3. Forrest M. Hoffman:橡树岭国家实验室,田纳西州橡树岭(ESM,AI) 4. Vipin Kumar:明尼苏达大学,明尼苏达州双城(AI,HPC,气候/水) 5. Upmanu Lall:哥伦比亚大学,纽约州纽约市(水文学,气候,AI) 6. Claire Monteleoni:科罗拉多大学,科罗拉多州博尔德(ML,AI,气候信息学) 7. Jitendra Kumar:橡树岭国家实验室,田纳西州橡树岭(水文学,模型) 8. Nagendra Singh:橡树岭国家实验室,田纳西州橡树岭(GIS,地球科学) 9. Julia Hopkins:东北大学,马萨诸塞州波士顿(自然启发设计) 10. Anuj Karpatne:弗吉尼亚理工大学,弗吉尼亚州布莱克斯堡(物理引导人工智能,水资源) 11. Shafiqul Islam:塔夫茨大学,马萨诸塞州梅德福(水文学,水外交) 12. Samrat Chatterjee:太平洋西北国家实验室,华盛顿州里奇兰(风险,俄勒冈州)

生物技术创新者
Nagendra K Singh教授基因组基金会主席和J.C. Bose National院士,ICAR-National植物生物技术研究所,PUSA校园,新德里教授Dinesh Raj Modi教授,Dinesh Raj Modi教授,BBAU,BBAU,BBAU,LUCCNOW教授Jagtar Singh Singh of Sunig keordechnologic of Suniil Kiotechnologar,Bbau教授Khare主任,加尔各答,加尔各答教授Vinod Kumar Nigam教授生物工程与生物技术系Birla Birla Technology,Mesra,Mesra,Mesra,Ranchi Wamik Azmi教授生物技术系喜马拉研究萨兰吉(Sarangi)前高级科学家CSIR-NEERI,NAGPUR,NAVEEN CHANDRA BHIST科学家,国家植物基因组研究所,新德里,Ramwant Gupta博士,Deen Dayal upadhyaya Gorakhpur University,Gorakhpur University,gorakhpur kumar(Uttrany)的植物学系植物学系植物学系副教授。勒克瑙(Lucknow),勒克瑙北方邦(Lucknow uttar PradeshNagendra K Singh教授基因组基金会主席和J.C. Bose National院士,ICAR-National植物生物技术研究所,PUSA校园,新德里教授Dinesh Raj Modi教授,Dinesh Raj Modi教授,BBAU,BBAU,BBAU,LUCCNOW教授Jagtar Singh Singh of Sunig keordechnologic of Suniil Kiotechnologar,Bbau教授Khare主任,加尔各答,加尔各答教授Vinod Kumar Nigam教授生物工程与生物技术系Birla Birla Technology,Mesra,Mesra,Mesra,Ranchi Wamik Azmi教授生物技术系喜马拉研究萨兰吉(Sarangi)前高级科学家CSIR-NEERI,NAGPUR,NAVEEN CHANDRA BHIST科学家,国家植物基因组研究所,新德里,Ramwant Gupta博士,Deen Dayal upadhyaya Gorakhpur University,Gorakhpur University,gorakhpur kumar(Uttrany)的植物学系植物学系植物学系副教授。勒克瑙(Lucknow),勒克瑙北方邦(Lucknow uttar Pradesh
印度法律报道
Jyotshnamayee Kanungo -V- A. Koramani Patra 817 Khagapati Kalar -V- 奥里萨邦 807 Krushna Chandra Panda -V- 奥里萨邦及其他。 1035 Krutibas Das -V- Shree Shree Gopaljee Mahaprabhu,Sonepur 868 Labanya Pati @ Paty -V- Santanu Kumar Mishra 804 Maheswar Mohapatra -V- 印度联邦及其他人。 782 Manoj Kumar Pati -V- 印度国家银行及其他公司959 马诺兰詹·莫汉蒂 -V- Dy。书记官,OAT,克塔克法庭及其他人士。 790 Naba Kishor Panda -V- 奥里萨邦及其他地区。 1065 纳根德拉·库马尔·辛哈等人-V- 奥里萨邦及其他地区。第885章 魔兽争霸有限公司-V- MV Debi 974 Pardeshi Patel -V- 奥里萨邦 1089 Pradip Kumar Pattanaik -V- 奥里萨邦(警惕) 1073 Pramod Digal -V- 奥里萨邦 843 Rajashree Gajendra -V- 区副登记员,Khordha & Anr。 860 Rajkishore Mallick -V- 奥里萨邦及其他地区。 904 拉玛·钱德拉·达什 -V- Spl. LAO,Daitary-Banasapani 铁路连接,Keonjhar 1057 Ramahari Naik -V- Sujata Naik 799 Rashmi Rekha Mohapatra -V- 专员,KVS,新德里及其他人。 745 Rebati Ballav Tripathy -V- 奥里萨邦(GA 部门)1083 Sagram Tudu & Anr。 -V- 国家人权委员会及其他机构。 923 Sampada Patra -V- 奥里萨邦 824 Sanjay Kumar Behera -V- 奥里萨邦(CID 和 CB) 1105 Santosh Kumar Tripathy -V- 印度联邦和 Anr。 854 Sarbeswar Jena & Anr. -V- 奥里萨邦(警惕)1100 Shyamabandhu Mishra(已去世)通过他的 LR。 -V- Banalata Mishra(已故)及其他人员。