XiaoMi-AI文件搜索系统
World File Search SystemOMNI
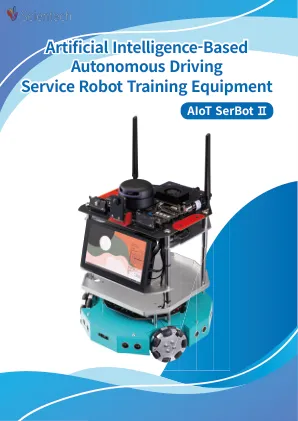
Aiot Serbot
AI应用程序练习设备基于室内服务机器人平台NVIDIA高性能AI平台用于脑板触摸显示和用于GUI基于GUI的用户界面和深度学习的高分辨率广角摄像头,并通过Digital Modio和Audio Modile提供了多种多样的型号,并提供了千兆以太网,可提供多种多样的型号。 expansion interfaces are supported The driving part adopts a 3-axis omni wheel to maximize the robot's movement efficiency and minimize the turning radius For precise control of the driving part, controller equipped with a high-performance MCU controls omni wheel motor, encoder and sensor Connected via highly reliable CAN FD communication for collaboration between brain board and controller Built-in power path management circuit to make it possible to continue practicing even while the battery is charging Service robot development is supported through ROS2, robot standard middleware High-level Pop libraries enabling to focus on application implementation is provided CUDA-based PyTorch and Tensorflow artificial intelligence framework are supported Web browser-based Google block coding platform (Blockly) is supported Pre-set integrated development environment based on Visual Studio Code for professional application development is supported Deep learning-based service robot learning contents are provided On-device AI self-driving car培训设备

了解频谱的未来使用 - ITU
– 仪表着陆系统 (ILS), – 甚高频全向无线电信标 (VOR), – 测距设备 (DME), – 紧急定位发射机 (ELT), – 防撞系统 (ACAS), – 二次监视雷达 (SSR), – 交通防撞系统 (TCAS), – 雷达高度计、无线电测定站(包括雷达和信标), – 微波着陆系统 (MLS), – 机载气象雷达 (AWR) 和机载多普勒雷达。

通过抑制 α4β7 和 αEβ7 实现炎症性肠病中淋巴细胞归巢和保留的双重靶向性
戴冰冰,1,12 Jason A. Hackney,4,12 Ryan Ichikawa,3 Allen Nguyen,4 Justin Elstrott,5 Luz D. Orozco,2 孙开晖,6 Zora Modrusan,6 Alvin Gogineni,5 Alexis Scherl,7 John Gubatan,8 Awal Habzion,Monica,99。 1 DNA Way,南旧金山,CA 94080,美国 2 生物信息学,Genentech,Inc. 1 DNA Way,南旧金山,CA 94080,美国 3 Biomarker Discovery OMNI,Genentech,Inc. 1 DNA Way,南旧金山,CA 94080,美国 4 OMNI Biomarker Development,Genentech,Inc. 1 DNA Way,南旧金山,CA 94080,美国 5 生物医学成像,Genentech,Inc. 1 DNA Way,南旧金山,CA 94080,美国 6 分子生物学,Genentech,Inc. 1 DNA Way,南旧金山,CA 94080,美国 7 病理学,Genentech,Inc. 1 DNA Way,南旧金山,加利福尼亚州 94080,美国 8 斯坦福大学医学院医学系胃肠病学和肝病学分部,斯坦福,加利福尼亚州 94305,美国 9 加利福尼亚大学旧金山分校 (UCSF),美国加利福尼亚州旧金山 94143,美国 N 55905,美国 11 基因泰克公司产品开发部1 DNA Way, South San Francisco, CA 94080, USA 12 这些作者贡献相同 13 主要联系人 *通讯地址: keir.mary@gene.com (MEK), yi.tangsheng@gene.com (TY)
理学硕士 / 哲学硕士 / 硕士 / 理学硕士招生 2025 年春季(开启...
或者申请人需要通过支付 2,200 卢比的令牌登录入学门户。可以通过三种方式获取令牌号:(a) 前往巴基斯坦任何地方的 UBL 分行支付罚单,(b) 如果您是 UBL 帐户持有人,则通过 UBL 移动应用程序,或 (c) 如果您不是 UBL 帐户持有人,则通过 UBL Omni。无论哪种情况,令牌号都是您的罚单号,有效期至 2024 年 12 月 9 日星期一。• 相关文件需要扫描并随申请一起上传。有关详细信息,请访问入学门户。
NACDS零售咨询委员会
Kristen M. Abreu女士副总裁,客户开发跨马克,Inc。Dwight先生与副总裁和娱乐和个人护理与个人护理Wegmans Food Markets,Inc.。销售与贸易管理SANOFI消费者医疗保健(Chattem Inc.)Liz Caton Svp女士,Walgreens团队和美国药品客户团队Procter&Gamble Company Martina Ciers女士Martina Ciers女士董事 - 卫生与美容联合将女士Staci Cochran Omni Merni Merchanding vice总裁Walmart -Walmart
+ 无线世界
市场已经存在。我们的任何一位客户都会告诉您,Dataman 始终提供优质且支持良好的产品。这就是我们仍然在这里的原因!我们非常重视技术支持。如果您不满意,我们会退还您的钱。这些都是需要考虑的重要问题。但现在让我们来看看 O' 的一些特殊优势。ning Omni-Pro II。有什么好处?嗯,例如,接口不是通过计算机的并行端口。速度受限,可能连接到您的打印机。专用插入式半卡可执行快速数据传输。该软件是全彩色的专业软件包,仅需 400K RAM 即可运行。此外,它可以在任何 PC/AT 或兼容机上运行 - 甚至是最新的 486 机器。这是因为 Omni-Pro II 有自己的独立时钟 - 一些程序员依靠计算机计时,并且无法与更快的机器配合使用。接地引脚通过继电器连接 - 而不是通过逻辑输出连接。一些供应商不会批准不以这种方式接地引脚的程序员。40 针 Textool 插座无需取下盖子即可更换。提供全系列 PLCC 适配器。
+ 无线世界
市场已经存在。我们的任何一位客户都会告诉您,Dataman 始终提供优质且支持良好的产品。这就是我们仍然在这里的原因!我们非常重视技术支持。如果您不满意,我们会退款。这些都是需要考虑的重要问题。但现在让我们来看看 O'ning Omni-Pro II 的一些特殊优势。有什么好处?例如,接口不是通过计算机的并行端口。该端口速度有限,可能连接到您的打印机。专用的插入式半卡可执行快速数据传输。该软件是一个全彩色的专业软件包,仅需 400K RAM 即可运行。此外,它可以在任何 PC/AT 或兼容机上运行 - 甚至是最新的 486 机器。这是因为 Omni-Pro II 有自己的独立时钟 - 有些编程器依靠计算机计时,无法与更快的机器配合使用。接地引脚通过继电器连接 - 而不是通过逻辑输出。有些供应商不会批准不以这种方式接地引脚的编程器。40 针 Textool 插座无需取下盖子即可更换。提供全系列 PLCC 适配器。
+ 无线世界
市场已经存在。我们的任何一位客户都会告诉您,Dataman 始终提供优质且支持良好的产品。这就是我们仍然在这里的原因!我们非常重视技术支持。如果您不满意,我们会退还您的款项。这些都是需要考虑的重要问题。但现在让我们来看看 Omni-Pro II 的一些特殊优势。有什么好处?例如,接口不是通过计算机的并行端口。该端口速度有限,可能连接到您的打印机。专用的插入式半卡可执行快速数据传输。该软件是一个全彩色的专业软件包,只需 400K RAM 即可运行。更重要的是,它可以在任何 PC/AT 或兼容机上运行 - 甚至是最新的 486 机器。这是因为 Omni-Pro II 有自己的独立时钟 - 一些程序员依靠计算机进行计时,并且无法与更快的机器一起工作。接地引脚通过继电器连接 - 而不是通过逻辑输出连接。有些供应商不会认可不以这种方式接地引脚的编程器。无需拆下盖子即可更换 40 针 Textool 插座。提供全系列 PLCC 适配器。
+ 无线世界
市场已经存在。我们的任何一位客户都会告诉您,Dataman 始终提供优质且支持良好的产品。这就是我们仍然在这里的原因!我们非常重视技术支持。如果您不满意,我们会退还您的款项。这些都是需要考虑的重要问题。但现在让我们来看看 Omni-Pro II 的一些特殊优势。有什么好处?例如,接口不是通过计算机的并行端口。该端口速度有限,可能连接到您的打印机。专用的插入式半卡可执行快速数据传输。该软件是一个全彩色的专业软件包,只需 400K RAM 即可运行。更重要的是,它可以在任何 PC/AT 或兼容机上运行 - 甚至是最新的 486 机器。这是因为 Omni-Pro II 有自己的独立时钟 - 一些程序员依靠计算机进行计时,并且无法与更快的机器一起工作。接地引脚通过继电器连接 - 而不是通过逻辑输出连接。有些供应商不会认可不以这种方式接地引脚的编程器。无需拆下盖子即可更换 40 针 Textool 插座。提供全系列 PLCC 适配器。
+ 无线世界
市场已经存在。我们的任何一位客户都会告诉您,Dataman 始终提供优质且支持良好的产品。这就是我们仍然在这里的原因!我们非常重视技术支持。如果您不满意,我们会退还您的款项。这些都是需要考虑的重要问题。但现在让我们来看看 Omni-Pro II 的一些特殊优势。有什么好处?例如,接口不是通过计算机的并行端口。该端口速度有限,可能连接到您的打印机。专用的插入式半卡可执行快速数据传输。该软件是一个全彩色的专业软件包,只需 400K RAM 即可运行。更重要的是,它可以在任何 PC/AT 或兼容机上运行 - 甚至是最新的 486 机器。这是因为 Omni-Pro II 有自己的独立时钟 - 一些程序员依靠计算机进行计时,并且无法与更快的机器一起工作。接地引脚通过继电器连接 - 而不是通过逻辑输出连接。有些供应商不会认可不以这种方式接地引脚的编程器。无需拆下盖子即可更换 40 针 Textool 插座。提供全系列 PLCC 适配器。