XiaoMi-AI文件搜索系统
World File Search SystemSONAR

声纳管理咨询GMBH
更敏捷的结构在流程方面有更多的建议空间,每个人都需要更高的组织和决策的灵活性!以结果为首,而不是“一分钱”!您的大多数人都受过高度教育,完全有能力结婚,抚养孩子,建造房屋等。,如果他们是团队的一部分,他们不应该能够访问相关信息并独自工作?信任是最被低估的赞赏!
使用Sonar
摘要。该研究在灾难管理等领域和水勘探中介绍了一种新颖的动物和人类检测方法。与传统的视觉方法不同,声纳系统会发出声波来分析回声,从而在具有挑战性的环境中提供了独特的优势。提出的方法涉及收集原始声纳数据,然后采用预处理技术,以减少降噪,信号归一化和特征提取。声纳能够穿透包括水和密集雾在内的各种媒体的能力,使其对于在低可见性条件下检测动物和人类很有价值。此外,声纳在白天和夜间设置中都有效地运行,不受照明条件的影响。建议的检测系统将使用代表性数据集和现实世界情景进行全面的实验。性能指标,例如检测准确性,精度,召回效率和计算效率,并将与现有方法进行分析。该研究展示了使用声纳技术来进行动物和人类检测任务的有效性和可行性,从而强调了其在挑战性环境中的独特功能。
和多波束声纳后向散射图像
(https://maps.ccom.unh.edu/portal/apps/webappviewer/index.html?id=28df035fe82c423cb3517295d9 bbc24c#. 2021 年 12 月 10 日) ........................................................................................................................... 20 图 19:R/V Gulf Surveyor (http://ccom.unh.edu/facilities/research-vessels/rv-gulf-surveyor)。 .......... 21 图 20:RVGS 图,其中包含关键位置和拖曳点相对于船舶参考点的偏移(未按比例绘制)。 ............................................................................................................................. 21 图 21:安装了拖缆的 R/V Gulf Surveyor 甲板上的 Klein 4K-SVY 侧扫。 ............................................................................................. 23 图 22:具有声学阴影、距离尺度、第一次回波和水柱的典型 SSS 数据示例。 ........................................................................................................................................................... 24 图 23:带有集成表面声速探头的 Kongsberg EM2040P MBES。 (https://www.kongsberg.com/maritime/products/ocean-science/mapping-systems/multibeam-echo- sounders/em-2040p-mkii-multibeam-echosounder-max.-550-m/) ........................................................................... 25 图 24:安装在 R/V Gulf Surveyor 中心支柱上的 EM2040P(照片:NOAA 的 Patrick Debroisse 中尉)。 ........................................................................................................................................... 26 图 25:在 50m 范围内布置用于位置置信度检查的 SSS 线。 ........................................................................... 27 图 26:相对于 MBES 目标位置(红色)的 SSS 接触位置(蓝色)。 ......................... 28 图 27:地理参考框架和船舶参考框架中的接触位置误差。接触位置主要位于 MBES 位置的东面。 ......................................................................... 28 图 28:应用地图校正后的 SSS 接触位置。 ......................................................................... 29 图 29:应用地图校正后,在地理和船舶参考框架中看到的 SSS 接触位置 ............................................................................................................................. 29 图 30:测量区域,其中 60m 和 80m 线路平面图以红色显示。 ........................................................................... 30 图 31:掩盖马赛克(左)隐藏接触,透过马赛克(右)显示接触。 ...... 32 图 32:使用自动所有数据,显示应用增益和定位校正之前的所有线路的 SSS 马赛克。覆盖在 RNC 13283 上。...................................................................................................... 33 图 33:使用 Auto-All 数据可视化应用地图校正和 EGN 后的 SSS。....... 34 图 34:DTM(顶部)显示折射伪影,与 ping 数据(底部)中看到的伪影相同。...................................................................................................................................................................... 35 图 35:EM2040P MBES 数据的全覆盖 DTM............................................................................................................. 36 图 36:EM2040P 数据从天底滤波到 45º 后的 DTM。............................................................................. 37 图 37:EM2040P 以 300 kHz 和 50cm 分辨率收集的 MBAB。西北采集点在左侧,东南采集点在右侧。后向散射强度以分贝表示,默认比例为 10 到 -70dB。 ........................................................................................................................... 38 图 38:调整后的 NW MBES 数据可视范围为 -4 至 -28db.................................... 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。........................................ 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。............................................................................................................. 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。............................................................................................. 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红色框突出显示了沙波应重叠的区域。............................................................................. 42 图 43:NW 采集站点:叠加之前的 MBES(顶部)、SSS(中)和 MBES 后向散射(底部)。 ........................................................................................................................................................... 44 图 44:SE 采集点:叠加前的 MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)。 ........................................................................................................................................... 45左侧为西北方向采集点,右侧为东南方向采集点。后向散射强度以分贝表示,默认范围为 10 至 -70dB。 ........................................................................................................................... 38 图 38:调整后的西北方向 MBES 数据可视范围为 -4 至 -28db........................................ 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。............................................................. 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。 .................................................................................................................... 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。 .................................................................................................................... 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红框突出显示了沙波应该重叠的区域。 ........................................................................... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45左侧为西北方向采集点,右侧为东南方向采集点。后向散射强度以分贝表示,默认范围为 10 至 -70dB。 ........................................................................................................................... 38 图 38:调整后的西北方向 MBES 数据可视范围为 -4 至 -28db........................................ 39 图 39:SSS 接触位置(左)和 MBES 假定的“真实”位置(右)。............................................................. 40 图 40:应用地图校正后的 SSS 接触位置。原始 SSS 位置以绿色标记标注。 .................................................................................................................... 41 图 41:地图校正前(左)和地图校正后(右)的另一个示例,最初显示两条独立的龙虾笼线。 .................................................................................................................... 41 图 42:应用地图校正后,两条 SSS 线之间的差异约为 7.5 米。红框突出显示了沙波应该重叠的区域。 ........................................................................... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45........... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45........... 42 图 43:NW 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 44 图 44:SE 采集点:MBES(顶部)、SSS(中间)和 MBES 背向散射(底部)在叠加之前。 ............................................................................................................................................................. 45
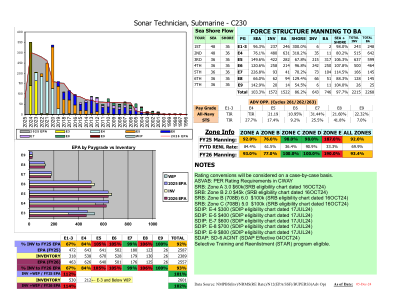
潜艇声纳技术员-C230
1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024 2025

主动声纳简史
加拿大纽芬兰海岸。对所谓的费森登振荡器的研究一直持续到 1931 年,在此期间,频率从 540 Hz 增加到 1,000 Hz(Lasky,1977 年;Hackman,1984 年;Bjørnø,2003 年;Katz,2005 年)。第一次世界大战中,潜艇成为较弱海军强国的首选武器——用今天的话来说,这是一种“不对称威胁”——刺激了对水下潜艇的探测需求,而这些潜艇本来是隐形的(Cote,2000 年)。潜艇的隐蔽性和海洋的不透明性深刻改变了 20 世纪剩余时间的海战(Keegan,1990 年;Cote,2000 年)。由于声音是唯一能在水中传播可观距离的传输能量,因此必须利用声学回声测距来应对这一威胁。第一次世界大战后出现的最重要的回声测距系统是超声波 ASDIC,这是英国和法国海军合作研制的。ASDIC 是盟军潜艇探测调查委员会的缩写,该委员会在第一次世界大战期间成立,以开展潜艇探测研究。意大利也进行了类似的研究,美国的研究范围更为广泛。1918 年,法国物理学家 Paul Langevin 使用一种设计为以 38 kHz 机械共振的发射器演示了第一个 ASDIC 系统,并用它来估计目标距离和方位(Lasky,1977 年;Urick,1983 年;Burdic,1984 年;Hackman,1984 年;Bjørnø,2003 年;Proc,2005 年)。第一个 ASDIC 舰载系统于 1919 年安装,该系统有一个覆盖式圆顶,使系统可以在船舶移动时运行。工作频率从 20 到 50 kHz 不等。在 20 世纪 20 年代和 30 年代初,ASDIC 被开发用于驱逐舰的反潜战 (ASW)。两次世界大战之间的时期也是水下声学基础研究的时期。这一时期的一个关键发现是,水下较高频率的声音在穿过海水时,其振幅比较低频率的声音衰减得更大。基于这一观察,新型驱逐舰 ASDIC(119 型)的频率范围从

全向多波束声纳监测 - IRD
摘要 通过中频全向多波束声纳获取的数据开发可用于开展渔业研究中的原始研究,但尽管大多数渔船和许多研究船上都配备了此类设备,但却很少使用。这是唯一用于实时监测船只或浮标周围水平全向平面内鱼群的系统。1996 年至 2001 年间,我们使用了两种标准全向声纳,并根据两种主要采样方案开发了利用其特定声学数据的新方法:“勘探”,包括捕鱼和搜索作业,以及“漂流”,如使用仪器浮标系统或在固定船只上。我们提出了一种从研究船或商船上连续采集数据的完整方法,并通过图片分析和数据处理方法自动提取数据。考虑了两种数据分析情况:第一种是基于逐个学校的“单校”模式;第二种模式考虑了在声纳采样范围内检测到的所有鱼群,即“集群”模式。基本声纳信息分为五类,包括 24 个调查和声纳参数以及 55 个鱼群、集群和渔民行为描述符。我们回顾了这些类别的应用,并讨论了它们在渔业科学中的应用前景。如果声纳系统能够评估船只避让对鱼群生物量评估的影响,那么简单的声纳回声积分过程就无法提供准确的丰度估计。全向声纳数据可用于集体分析鱼群的游泳速度、扩散和迁移方面的运动学、群体分裂和合并指数等聚集动力学、集群的空间特征(如鱼群密度)、二维结构和渔民行为。将这些数据整合到鱼群数据库中,包括多频回声测深仪和横向多波束(3D)声纳数据与物种识别方法相结合,将能够全面了解鱼群行为,从而采用准确的渔业管理方法。
声纳技术员(潜艇)(STS)-MyNavyHR
基本声纳操作员检测、跟踪和分类水面和水下接触点;对大型声纳系统、测深设备和其他辅助设备进行小规模维护并操作它们;并执行拖曳阵列处理演进。国防部关系 O*NET 关系组标题国防部代码职业名称 SOC 代码职位类别声纳,通用 113000 空中交通管制员 53-2021.00 运输和物料搬运技能能力复杂问题解决信息排序操作监控演绎推理批判性思维闭合灵活性数学归纳推理设备选择问题敏感性操作和控制听觉注意系统评估数学推理设备维护闭合速度技术设计感知速度主动学习书面理解