XiaoMi-AI文件搜索系统
World File Search SystemSSIM

未经训练的感知损失,用于MR图像中线状结构的图像降级
在获取磁共振(MR)图像中,较短的扫描时间会导致更高的图像噪声。因此,使用深度学习方法自动图像降解是高度兴趣的。在这项工作中,我们集中于包含线状结构(例如根或容器)的MR图像的图像。特别是,我们研究了这些数据集的特殊特征(连接性,稀疏性)是否受益于使用特殊损失功能进行网络培训。我们特此通过比较损失函数中未经训练的网络的特征图将感知损失转换为3D数据。我们测试了3D图像降级的未经训练感知损失(UPL)的表现,使MR图像散布脑血管(MR血管造影-MRA)和土壤中植物根的图像。在这项研究中,包括536个MR在土壤中的植物根和450个MRA图像的图像。植物根数据集分为380、80和76个图像,用于培训,验证和测试。MRA数据集分为300、50和100张图像,用于培训,验证和测试。我们研究了各种UPL特征的影响,例如重量初始化,网络深度,内核大小以及汇总结果对结果的影响。,我们使用评估METIC,例如结构相似性指数(SSIM),测试了四个里奇亚噪声水平(1%,5%,10%和20%)上UPL损失的性能。我们的结果与不同网络体系结构的常用L1损失进行了比较。我们观察到,我们的UPL优于常规损失函数,例如L1损失或基于结构相似性指数(SSIM)的损失。对于MRA图像,UPL导致SSIM值为0.93,而L1和SSIM损耗分别导致SSIM值分别为0.81和0.88。UPL网络的初始化并不重要(例如对于MR根图像,SSIM差异为0.01,在初始化过程中发生,而网络深度和合并操作会影响DeNo的性能稍大(5卷积层的SSIM为0.83,而核尺寸为0.86,而5卷积层的0.86 vs. 0.86对于根数据集对5卷积层和5卷积层和内核尺寸5)。我们还发现,与使用诸如VGG这样的大型网络(例如SSIM值为0.93和0.90)。总而言之,我们证明了两个数据集,所有噪声水平和三个网络体系结构的损失表现出色。结论,对于图像
用于高质量脑成像的计算高效的 CNN 系统......
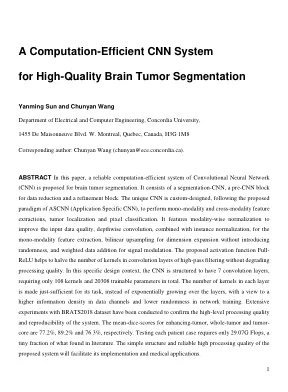
(a) (b) 图 4. (a) 无肿瘤的 Flair 切片示例。上半部分和下半部分的 SSIM 值为 0.308。 (b) 有肿瘤的 Flair 切片示例。上半部分和下半部分的图案不相互镜像。其 SSIM 值为 0.174。

预测带有级联扩散模型的热带气旋
由于气候变化,热带气旋变得更加激烈,与基于数学模型的传统方法相比,基于AL的建模的崛起提供了一种更实惠和更容易获得的方法。这项工作通过整合卫星成像,遥感和大气数据来利用生成扩散模型来预测旋风轨迹和降水模式。它采用了一种级联的方法,该方法包含三个主要任务:预测,超分辨率和降水建模。培训数据集包括2019年1月至2023年3月的六个主要热带气旋盆地的51个旋风。实验表明,来自级联模型的最终预测显示,对于所有三个任务,分别超过0.5和20 dB的良好结构相似性(SSIM)和峰值信号 - 噪声比(PSNR)值(SSIM)和峰值信号 - 噪声比(PSNR)值分别具有出色的结构相似性(SSIM)。可以在单个NVIDIA A30/RTX 2080 Ti的30分钟内生成36小时的预测。这项工作还强调了AL方法的有希望的效率,例如在天气预报中为高性能需求的扩散模型,例如热带气旋预测,同时保持计算负担得起,使其非常适合具有关键预测需求和财务限制的高度脆弱区域。代码可在https://github.com/nathzi1505/forecast-diffmodels上访问。
![[2]高棉的文本图像重建和赔偿...](/simg/1\1436b766064e02f32511275e22f481abc7f51e52.webp)
[2]高棉的文本图像重建和赔偿...
摘要:本研究的重点是使用先进的计算机视觉和深度学习技术提出文本图像重建和赔偿框架来保存柬埔寨的历史高棉棕榈叶手稿。为了解决保存,使用卷积神经网络(CNN)和生成对抗网络(GAN)来填充受损图像中字符缺失的模式。该研究利用Sulukrith集[1],该集合由91,600张图像组成,分为两个部分:90,600个训练图像和1,000张测试图像。每个图像包含高棉棕榈叶脚本的单个字符。训练图像故意降解为三种不同的变体,每个变体均遭受三个级别的降解(1级,第2级和第3级)。评估性能并比较卷积神经网络(CNN)和生成对抗网络(GAN)模型的有效性,并采用了各种评估指标。这些指标包括均方根误差(MSE),峰值信噪比(PSNR)和结构相似性指数(SSIM)。通过根据这些指标评估两个模型的结果,可以观察到,GAN模型在MSE,PSNR和SSIM方面始终优于CNN模型。与CNN模型相比,GAN模型达到了较低的MSE值,较高的PSNR值和更高的SSIM值,这表明其在图像重建和保留原始文本方面具有出色的性能。

Robust-Deep:一种增加脑成像数据集以提高深度学习模型性能和鲁棒性的方法
摘要 小型数据集通常会影响医学成像研究中深度神经网络 (DNN) 的泛化、稳健性和整体性能。由于收集大型临床数据库始终很困难,我们提出了一种生成大型真实/多样化数据集的分析方法。临床脑部 PET/CT/MR 图像包括全剂量 (FD)、低剂量 (LD)(仅对应于 FD 扫描中获取的事件的 5%)、非衰减校正 (NAC) 和基于 CT 测量的衰减校正 (MAC) PET 图像、CT 图像以及 35 名患者的 T1 和 T2 MR 序列。所有图像均已注册到蒙特利尔神经研究所 (MNI) 模板。使用拉普拉斯混合,利用来自两个不同患者的图像的频域信息以及混合蒙版进行自然呈现。这种来自计算机视觉和图像处理社区的经典技术仍然被广泛使用,并且与现代 DNN 不同,它不需要训练数据。实施了改进的 ResNet DNN 来评估四个图像到图像的转换任务,包括 LD 到 FD、LD+MR 到 FD、NAC 到 MAC 和 MRI 到 CT,使用和不使用合成图像。使用已建立的指标进行定量分析,包括峰值信噪比 (PSNR)、结构相似性指数度量 (SSIM) 和联合直方图分析,以进行定量评估。包含 35 名患者的注册小数据集与包含 350 个合成数据集加 35 个真实数据集的大数据集之间的定量比较显示,LD 到 FD 的 RMSE 和 SSIM 分别提高了 29% 和 8%,LD+MRI 到 FD 的 RMSE 和 SSIM 提高了 40% 和 7%,NAC 到 MAC 的 16% 和 8%,MRI 到 CT 映射任务的 24% 和 11%。定性/定量分析表明,与参考图像相比,所提出的模型通过生成更高质量、更低定量偏差和方差的图像,提高了所有四个 DNN 模型的性能。

基于学习的基于学习的运动伪影在功能近红外光谱中的去除
尽管多年来FNIRS技术得到了改进,但FNIRS数据集的处理仍然是一项艰巨的任务。尤其是,由于Optodes和Scalp之间的耦合变化而导致的运动伪影识别并纠正并纠正了很难且耗时。此类伪影表示为时间序列信号中的峰值或偏移。由于峰或移位的幅度通常比血液动力学反应功能(HRF)高得多,因此FNIRS信号被显着污染,并且不会反映皮质激活。当头部和四肢的运动在实验方案中不可避免甚至需要时,这种现象就会更明显,例如语音,17个步行,18和手术任务。11,12最近,由于可穿戴或无线FNIRS设备(19,20)的升高,该问题加剧了这些设备的移动范围,用于跑步或团队工作,这些设备更容易受到运动文物的影响。因此,消除运动伪影的有效方法对于在这些情况下利用FNIR是必不可少的。多年来开发的一些策略包括在数据处理过程中保留任何具有运动伪像的试验。仅当收集大型数据集并且不是当前的主要实践时才使用。另一种策略是通过视觉检查识别具有运动伪影的试验/通道,或在普遍的FNIRS数据处理工具箱Homer2中使用诸如HMRMotionArtifact功能之类的功能,然后从进一步分析中丢弃它们。为例,参考。35最近的研究36不过,最合适的方法是使用高级时间序列数据处理方法处理这些试验/通道。这些包括样条插值,21小波滤波,22个主成分分析(PCA),23 Kalman滤波,24和基于相关的信号改进(CBSI)。25这些方法的性能在很大程度上取决于一组假设,以描述运动伪影和参数相关调整的主观选择(表1)。29证明,选择PCA参数,即PCA删除27为0.80和0.97的数据中的方差百分比产生了显着不同的结果。因此,高度可取的方法,不需要对参数的主观微调或不依赖严格的假设的方法。在这里,我们提出了一种自动学习噪声特征的深度学习方法。在过去十年中,深度神经网络已成为一种强大的工具,可以快速有效地抑制图像数据集中的噪声。深度学习模型已被证明可以增强竞争性降解结果,同时与召开方法相比,保留了更多纹理细节。30 - 33深度学习网络在应用于医学成像问题时也表现出卓越的性能。例如,denoising自动编码器(DAE)模型可以Denoise乳房X线照片[结构相似性指数量度(SSIM)从0.45到0.73]和Dental X射线数据(SSIM从0.62到0.86)。34 A DAE模型的峰值信噪比(PSNR)和SSIM高10%,而SSIM比胸部辐射图中的常规算法高。

使用自动指导的车辆机器人
摘要 - 自主机器人在工业世界中生长和使用,并且变得很重要,该机器人广泛用于各个工业领域。自主机器人使用导航系统识别环境,导航在自主机器人中具有重要作用。除了应用良好的导航外,还需要在周围环境中获得准确的地图,以便机器人可以根据环境移动。在这项研究中,将使用Hector SLAM算法方法对映射结果进行准确分析,以通过模拟和实时(机器人)映射周围环境。在这项研究中,它具有几个重要组件,即机器人操作系统(机器人操作系统),即诸如Hector扫描匹配的数据滤波器,可构建所获得的数据,以及极大地影响生成地图质量的传感器类型。本研究测试Hector扫描匹配算法是否可以准确映射环境。这项研究的结果可以得出结论,从模拟和机器人(真实)生成的地图具有相当好的精度。这是基于与模拟和机器人(真实)映射的结果匹配的第一个方案,该结果的精度为SSIM:77.26%,MSE错误:3.96%,像素匹配:55.46%的机器人(真实)映射结果。同时,从用于与获得SSIM准确性的机器人相比的第二种情况下获得的仿真结果:87.29%,MSE错误:1.65%和像素匹配:81.11%。Kata Kunci:机器人操作系统,Hector-SLAM,Hector扫描匹配,均方根误差,像素匹配,结构相似性图像度量,峰值信噪比,LIDAR。摘要 - 自主机器人在工业界越来越多地发展和使用,在各个工业领域都发挥了重要作用并广泛使用。自主机器人使用导航系统浏览其环境,导航在自主机器人中至关重要。为了实施有效的导航,它需要准确的周围环境地图,以便机器人可以根据周围环境移动。这项研究分析了使用Hector SLAM算法方法通过模拟和实时(机器人)绘制周围环境的映射的准确性。这项研究包括几个重要组件,即机器人操作系统(机器人操作系统),数据过滤器(例如用于构建获得的数据的Hector扫描匹配)等数据过滤器,传感器类型显着影响所得地图的质量。研究检查了Hector扫描匹配算法是否可以准确映射环境。这项研究的结果可以得出结论,由模拟和真实机器人产生的地图具有相对良好的精度。这是基于仿真和真实机器人映射的匹配结果,在方案1中结果得出了SSIM的精度:77.26%,MSE错误:3.96%,像素匹配:55.46%的真实机器人映射结果。同时,从用于与机器人进行比较的方案2中获得的仿真结果,SSIM的准确性:87.29%,MSE错误:1.65%和像素匹配:获得了81.11%。关键字:机器人操作系统,Hector-slam,Hector扫描匹配,均方根误,像素匹配,结构相似性图像指标,峰值信噪比,LIDAR

通过逼真的雾对摄影
通过雾进行成像在诸如自动驾驶汽车,增强驾驶,飞行飞机,直升机,无人机和火车等工具中具有重要的应用。在这里我们表明,从雾反射的光的时间填充具有分布(伽马),该分布与从雾(高斯)遮住的物体所反映的光中不同。这有助于区分背景光子与雾和信号光子从遮挡物体反射的信号光子之间。基于此观察结果,我们恢复了被密集,动态和异质雾阻塞的场景的反射和深度。对于实际用例,成像系统以最小的占地面积为单位的反射模式设计,并基于LiDAR硬件。特别是,我们使用单个光子雪崩二极管(SPAD)摄像机,该摄像头将计入单个检测到的光子。在没有先验知识的情况下,开发了一个概率计算框架,以估计雾化本身的雾性特性。其他解决方案是基于雷达的,该雷达遭受分辨率较差(由于长波长)的障碍,或者按时门控遭受较低的信噪比。建议的技术在雾室中产生的多种雾密度中进行了实验评估。它在可见度为37厘米时演示了离相机57厘米的恢复对象。在这种情况下,它以5厘米的分辨率恢复了深度,并且场景反映了PSNR和3的4DB的反射。4×SSIM的重建质量随时间推移门控技术。4×SSIM的重建质量随时间推移门控技术。

混合量子表示和希尔伯特(Hilbert)
摘要。目的:这项工作旨在应用量子希尔伯特(Hilbert)争夺,以增强图像水印的安全性和完整性,而不会影响视觉质量退化。对被调查方法的进一步概念可能会为传统的水印方法提供一个很好的解决方案,以通过新的量子计算概念解决数字图像安全性和完整性的一些问题。方法:本文回顾了量子希尔伯特(Hilbert)争夺,其计算复杂性为𝑂(𝑛22 2)。该过程涉及将图像编码为量子状态,并用希尔伯特曲线置换量子,并使用量子门嵌入水印。结果:定量性能评估指标,例如峰信号与噪声比(PSNR)和结构相似性指数(SSIM),显示出高峰信号与噪声比(PSNR)值的高峰值信号(PSNR)值,从56.13 dB到57.87 db至57.87 db,结构相似性指数(SIM)(SSIM)(SIM)(SIM)(SIM)(SIM)(SIM)来自0.9985至0.985至0.999990,相应地愿意。这证明了质量降解非常小,结构的细节得到很好的维护。新颖性:所提出的方法将量子计算与传统水印步骤集成在一起,以在数字水印中采用安全有效的方法。进一步的开发应集中于改善有关计算效率的量子电路,将方法的适用性扩展到广泛的图像上,以及在水印中的各种情况,并通过结合量子和经典方法来提高性能和可伸缩性,以找到混合方法。关键字:希尔伯特(Hilbert)争夺,图像水印,量子希尔伯特(Hilbert)争夺,2024年7月收到的绩效测量 / 2024年10月修订 / 2024年11月接受的这项工作已在创意共享4.0国际许可下获得许可。

来自时间数据的空间图像:补充
本文档为“时间数据的空间图像”提供了补充信息。文档结构如下:第 I 节讨论了用于生成飞行时间图像和时间直方图的数值算法(数值正向模型);第 II 节解释了图像(逆)检索算法;第 III 节给出了额外的实验细节;第 IV 节讨论了结构相似性指数 (SSIM) 方面的重建图像质量,重点介绍了可能影响检索算法性能的因素;第 V 节证明了我们的成像方法可以扩展到单点射频天线;最后,第 VI 节给出了 ToF 模拟和 ANN 训练的伪代码。