XiaoMi-AI文件搜索系统
World File Search SystemStatic

静态和动态经济学
在经济学中,静态的概念是指有运动的情况。,但是这种运动是连续的,肯定的,规则的和恒定的。静态经济学并不涉及出乎意料的变化。它仅研究预期的经济活动。经济活动中没有意外变化或波动。根据Harrod教授的说法,“产出速率恒定的经济称为静态。”在静态经济中,在不同时间段内重复经济活动。 没有发生经济活动的变化。 例如,印度的国民收入在1977 - 78年增长了5%。 1978 - 79年和1979 - 80年的增长也为5%。根据Harrod教授的说法,“产出速率恒定的经济称为静态。”在静态经济中,在不同时间段内重复经济活动。没有发生经济活动的变化。例如,印度的国民收入在1977 - 78年增长了5%。1978 - 79年和1979 - 80年的增长也为5%。
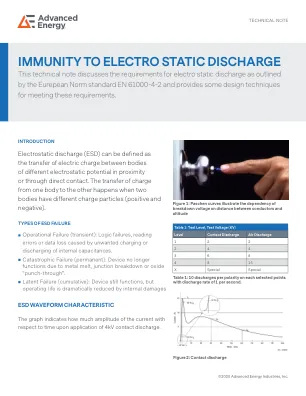
EN61000-4-11 AN-144 对电静电排放的免疫力 Trek 609b-3
静电放电(ESD)可以定义为在接近度不同或通过直接接触的不同静电电位的体之间的电荷转移。当两个物体具有不同的电荷颗粒(正和负)时,电荷从一个身体转移到另一个身体。


同时发生静态干扰的实时识别与规避...
使用有效的飞行策略在未知场景中避开混合障碍物是无人机应用面临的关键挑战。在本文中,我们介绍了一种更强大的技术,仅使用点云输入即可区分和跟踪动态障碍物和静态障碍物。然后,为了实现动态避障,我们提出了禁忌金字塔方法,以迭代方式采用有效的基于采样的方法求解期望的飞行器速度。通过求解具有期望速度和航路点约束的非线性优化问题来生成运动基元。此外,我们提出了几种技术来处理近距离物体的位置估计误差、可变形物体的误差以及不同子模块之间的时间间隔。所提出的方法已实现在机上实时运行,并在模拟和硬件测试中得到了广泛的验证,证明了我们在跟踪鲁棒性、能量成本和计算时间方面的优势。

底盘模型的确定和静态分析...
带有内燃机的车辆技术在19世纪末出现。尽管不是很清楚,但电动汽车的首次原型研究与同一时期一致。今天,诸如全球变暖,污染和化石燃料储备的减少等因素加速了对电动汽车技术的过渡。在这种情况下,电动驱动系统的新系统结构与传统车辆结构的不同。在这项研究中,进行了电动汽车的底盘设计。在设计时,将在ANSYS计划的帮助下对电池组进行建模和模拟的部分,以保护对撞击特别敏感的电池和电子组件。为了在法规和标准中指定的滥用测试中取得成功,应正确进行材料选择和设计。在这种情况下,正确的材料是根据研究确定的,并进行了3D模拟,并在模拟环境中进行了崩溃测试。结果,在许多底盘模型中选择了管型底盘,发现7079铝合金适合原材料。根据仿真结果,可以看出设计和所选合金是合适的。

ups——静态不间断电源
输入功率因数几乎等于 1(负载为 20% 时 PF = 0.99)和低谐波失真(THD ‹3%)可确保对网络的影响最小且能效高,从而降低能源管理成本。功率因数偏离单位值越大,电网吸收的无功功率就越大,运营商因此会提高电价。功率因数的校正还涉及减少任何上游发电机的过大尺寸,此前上游发电机的功率必须超过 UPS 的标称功率至少 30%,从而可以在构建连续性系统时进一步节省成本。精心控制网络吸收的电流可让您获得非常低的谐波输入电流失真水平(THD ‹3%)。电源线上的非线性负载引起的谐波失真决定了系统中存在的任何电流都高于预期,并且包含谐波频率分量:由于这些电流无法用维护人员配备的标准便携式仪器测量,因此这种现象可能被严重低估。即使电流保持在过载保护装置容量范围内,导体仍将在较高温度下运行,从而造成可量化的能源浪费,通常相当于总负载的 2-3%。
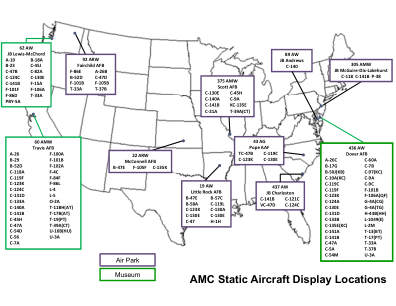
AMC 静态展示飞机位置
436 AW 多佛空军基地 A-26C C-60A B-17G C-7B B-50J(KB) C-97(KC) C-10A(KC) C-9A C-119C C-9C C-119F F-101B C-123K F-106A(QF) C-124A G-4A(CG) C-130E G-4A(TG) C-131D H-43B(HH) C-133B L-1049(E) C-135E(KC) L-2M C-141A T-13(BT) C-141B T-17(PT) C-47A T-33A C-5A T-37B C-54M U-3A

伞兵部署的静态计算机模拟...
介绍了一种能够预测伞兵部署的计算机模拟。部署过程分为三个阶段,使用不同的理论方法进行分析。使用有限元方法模拟降落伞在空气动力载荷下的弯曲,这种弯曲发生在从部署袋中提取过程中。伞盖充气采用半经验 Pflanz-Ludtke 方法建模。获得的结果与实际伞兵跳跃的照片和视频数据非常吻合。为了在 A400M 周围的非均匀流场内模拟部署,提出了一种利用风洞测试和 CFD 计算数据的方法。相应的模拟用于分析“交叉”的风险——这是一种潜在的致命情况,伞兵被拉向飞机后方的中心线。

变分原理与静态微扰理论
我们可以使用一种称为“变分量子特征求解器”(VQE)的量子算法来测试变分原理的实验有效性。该算法分为 4 部分:状态准备、量子门操作、能量测量和经典优化。在 VQE 实验中,我们得到一个哈密顿量 H ,其基态能量未知。我们准备一个猜测函数(一个假设)并将其编码到量子位集合上。一旦准备好这个状态,我们就将这些量子位输入一组量子模块,这些量子模块对这些量子位执行一系列量子门操作 - 这些门操作由哈密顿量 H 决定。然后,我们测量每个量子位的能量并将它们相加以获得总状态能量。最后,我们通过经典改变初始量子态的变分参数来优化这个能量。我们用新参数重复这个过程,直到找到最小能量。