XiaoMi-AI文件搜索系统
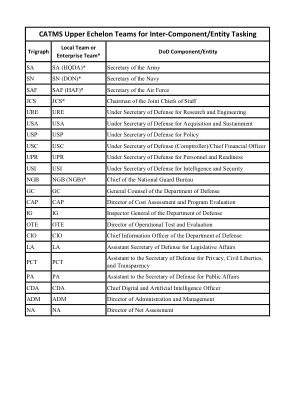
World File Search SystemTASKING

MPI+OpenMP 任务可扩展性,适用于人类大脑的多形态模拟
模拟人脑行为是当今最雄心勃勃的挑战之一,其重要应用无穷无尽。我们可以在美国、欧洲和日本找到许多不同的计划,它们试图实现这一具有挑战性的目标。在这项工作中,我们专注于最重要的欧洲计划(人脑计划)以及该项目开发的模型之一。该工具通过计算神经元形态的电压电容来模拟神经网络中触发的尖峰,是当今最精确的模拟器之一。在目前的研究中,我们评估了在此框架上使用 MPI + OpenMP 任务。我们证明,即使计算每个节点相对较低的工作负载(神经元数量),这种方法也能够实现良好的扩展。我们的目标之一不仅是实现高度可扩展的实现,而且还要开发一种具有高度抽象性的工具,而不会通过使用 MPI + OpenMP 任务来失去控制和性能。这项工作的主要动机是评估这种在多形态神经网络上的尖端模拟。模拟大量完全不同的神经元是一项重大挑战。事实上,在多形态模拟中,我们发现节点之间存在严重的不平衡,这主要是由于神经元之间的差异,导致可用资源的严重利用不足。在这项工作中,作者提出并评估了处理这个问题的机制,并大大减少了这种模拟的时间。

一种新的群体收集任务方法,用于持续的情境意识
涉及移动临时传感器代理的群技术应用程序越来越多地扩展到多个军事问题领域,例如战术智能,监视,目标获取和侦察(ISTAR)。在Istar中,由半自主传感器组成的团队合作实现了收集任务和执行,以弥合信息需求和信息收集之间的差距,以保持持久的情境意识。最新的贡献在很大程度上暴露了多维问题的复杂性。突出显示有限的板载传感器平台资源能力和能源预算,他们经常采用临时规定的传感器行为,从而导致过度保守的连接限制,偏见的决策和/或融合解决方案结构。这些可能会任意传达巨大的机会成本,并有害影响整体绩效。提出了一种创新的方法来处理移动临时传感器网络/群集收集任务问题,但要遵守有限的处理能力和有限的能源预算,以进行数据传播/通信路由。在有限的车载电源注意事项的驱动下,收集计划是集中式的,并由群体领导者进行了情节介导,而计划执行则分散。收集计划依赖于带有反馈决策模型公式的新开环。它是反复解决在退缩时间范围内最大化收集值的静态决策问题。情节决策由传入的请求,累积收集价值,持续的资源承诺,剩余资源能力和上一个阶段的反馈来调节。该方法结合了一个新的紧凑图表表示和一个合理的近似决策模型,以执行传感器代理路径计划优化,但要定期连接,以实现信息共享,融合,情境意识和动态解剖/计划。提出的最小跨越树沟通方案赋予了群体拓扑意识,并结合主张的连通性约束处理方法提供了理想的灵活性,以显着扩大整体可观察的域;探索更大的解决方案空间;减少能耗;最大化网络范围;并提供预期的收集最终提高情境意识。

BSK-RL:航天器任务的模块化,高保真增强学习环境
强化学习(RL)是一个高度适应性的框架,用于在广泛的问题领域中产生自主代理。虽然RL已成功地应用于高度复杂的现实世界系统,但大量文献研究了抽象和理想化的问题。尤其是航天器任务领域的情况,在这种情况下,即使是传统的预备方法也倾向于使用高度简化的航天器动力学和操作模型。当在全面模拟中测试简化的方法时,它们通常会导致保守的解决方案,这些解决方案是不可行的次优或侵略性解决方案。因此,需要高保真的航天器仿真环境来评估基于RL的和其他任务算法。本文介绍了BSK-RL,BSK-RL是一种开源Python软件包,用于为航天器任务问题创建和自定义加固学习环境。它结合了Basilisk(一种高速和高保真的航天器仿真框架)与RL环境的标准体育馆API包装器中的卫星任务和操作目标的抽象相结合。该软件包旨在满足RL和航天器操作研究人员的需求:环境参数易于重现,可自定义和随机化。环境是高度模块化的:可以指定卫星状态和操作空间,可以定义任务目标和奖励,并且可以配置卫星动力学和飞行软件,并隐式地引入操作限制和安全限制。可以为考虑沟通和协作的更复杂的任务场景而创建异质的多机构环境。使用包装的培训和部署用于具有资源限制的地球观察卫星。

伪相互注视可增强远程联合注意力任务中的脑间同步
图 4 凝视运动。 (a) 三种模式下参与者目光注视的示例。屏幕上显示 16 个字母数字字符,由 4×4 矩阵表示。每次试验在 16 个字符中有一个、三个或五个目标与声音呈现的单词相匹配。在单人模式下,屏幕上显示的红色圆圈表示参与者的注视点。在合作和竞争模式下,屏幕上两位参与者的注视点以红色和绿色圆圈区分。 (b) 单次试验中观察到的参与者扫描路径和注视热图的示例。虚线框在实验期间不可见,标记了目标的位置。请注意,观察者的注视点在实验期间不可见。 (c) 40 次试验的注视热图。 (d) 两位参与者眼动追踪热图之间的相似性。每个小提琴图(透明色)上都叠加了一个箱线图,显示了相似性度量的分布,包括单一、合作和竞争模式下的 Pearson's r、结构相似性指数度量 (SSIM) 和 Jaccard 相似性系数。黑色星号和线分别表示相似性的平均值和中位数。使用重复测量方差分析确定任务模式之间相似性的显著差异。

再次自动建立余额:使用双重任务作为干预老年人的平衡康复
平衡康复和预防的科学继续发展。目前,众所周知,平衡需要人与环境的动态和实时相互作用,以确定最佳的电机程序并监视最可能需要更改的地方[1,2]。还认识到,在任何给定任务中可用的平衡反应的选项本质上都是程序性的,并且主要是在对环境的潜意识分析上进行自动化的(手工持有,有关表面摩擦和稳定性的信息,障碍,准确性需求等)[3-6]。改善自动反应的科学,即程序性记忆,正在增长,并在运动科学领域不断发展,并慢慢地进入康复。最近,进步的过程记忆训练的证据表明并最终证明,可以通过暴露于大规模重复(实践)和使用双重任务干扰的强制性潜意识处理来开发主要运动任务的自动性[7-11]。体育科学已经定期采用这种方法,培训计划涉及篮球运动员持续分心各种注意力,以加强熟练运动的准确检索,无论游戏 - 环境环境如何(第二次篮球都可以运球和参加,人群支持或人群支持或反对,天气,天气,情境压力)。证据表明,这种应用在主要运动任务中恢复自动性,也可以应用于康复中的重新学习任务[10,12]。在所有这些应用中,教练,科学家和临床医生采用了涉及引入辅助任务或分配注意力储备的次级任务的策略,导致神经系统在程序记忆中心中处理主要任务。在本文中,将考虑注入余额康复的双重任务培训,以用于医疗保健专业人员为改善老年人平衡反应的努力。

Vision-1 图像:用户指南 - ESA Earth Online
表 1-1:Vision-1 的主要特性 ...................................................................................... 5 表 1-2:预期产品和传感器图像质量性能指标 .............................................................. 6 表 2-1:三种成像模式:条带模式、立体模式和区域模式 ...................................................... 7 表 3-1:Vision-1 光谱带 ...................................................................................................... 8 表 3-2:Vision-1 相对光谱带响应 ...................................................................................... 8 表 3-3:每个 Vision-1 波段的太阳光谱辐照度 ............................................................................. 10 表 5-1:DIMAP 元数据文件描述 ............................................................................................. 15 表 5-2:通用 Vision-1 产品文件结构 ............................................................................................. 16 表 5-3: 和 详细描述 ............................................................................. 17 表 5-4:Vision-1 产品文件 ............................................................................................................. 17 表 6-1:一项任务摘要 ............................................................................................................. 18 表 6-2:One Tasking 选项概述 ...................................................................................................... 19 表 6-3:OneDay 参数 .............................................................................................................. 20 表 6-4:OneNow 参数 ............................................................................................................ 21 表 6-5:OnePlan 参数 ............................................................................................................. 22 表 6-6:OneSeries 常规参数 ............................................................................................. 24 表 6-7:OneSeries 关键参数 ............................................................................................. 24 表 6-8:多周期监控所需的详细信息 ............................................................................................. 25 表 6-9:定期监控所需的详细信息 ............................................................................................. 26 表 6-10:One Tasking 规范 ............................................................................................................. 28 表 8-1:订单通知 ............................................................................................................................. 31 表 8-2:根据处理级别的交付时间 ............................................................................................. 31
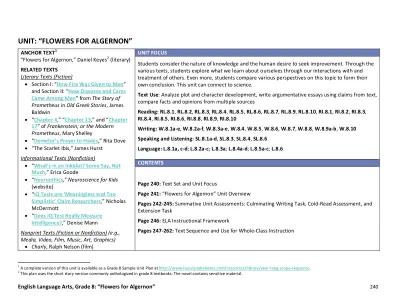
单位:“阿尔及农的花”
•第1课:旧希腊故事中的普罗米修斯的故事(示例任务)•第2课:进度报告“阿尔及农的花朵”(示例任务)•第3课:“墨迹中有什么?有人说,没有太多”(示例任务)•第4课:进度报告“阿尔格农花”的进度4-8•第5课:进度报告9的“阿尔格尔农”(示例任务)•第6课:弗兰肯斯坦第4章的进度报告“阿尔格农的鲜花”的进度第10章,“鲜花”,“如何向男人进行火灾报告,proment forps al proment for al proment forshe forpers forpers forshe forpers in proment forpers forphern forpers forpers forpers in proments•课程)•课程7弗兰肯斯坦的“第13章和第17章”•第8课:“阿尔格农花”的进度报告11,“对黑德斯的祈祷”(示例任务)•第9课:“阿尔格农花的鲜花”的进度报告12,“疾病和疾病的疾病和习惯”,“疾病和习惯是在prometheus of Prometheus of Prometheus of Prometheus of Melting Tasking Tasking themand the the Cressing 10:“ scress thress thress thress insply 10:” (电影)•第12课:“神经伦理学”,儿童神经科学(扩展任务)•第13课:“智商测试是'毫无意义且过于简单的'主张研究人员,”“智商测试是否真的衡量智力?” (冷阅读评估)
APD-1.0.pdf - NATO STO
负责任何北约标准化文件的高级委员会是其各自领域的任务授权机构 (TA)。TA 共享和验证标准化提案,制定和批准任务,并制作、同意、审查和维护北约标准化文件。TA 通过 NDPP 为互操作性要求和标准化解决方案的开发做出贡献。有关北约标准化文件的制定、颁布和审查的所有决策都将由负责 TA 的盟国协商一致做出。任务授权机构可以将这些职能委托给另一个 TA,或委托给称为授权任务授权机构 (DTA) 的下属机构。出于透明度、协调和效率的目的,任何 DTA 都应直接向其 TA 报告标准化决策。