XiaoMi-AI文件搜索系统
World File Search SystemVEHICLE
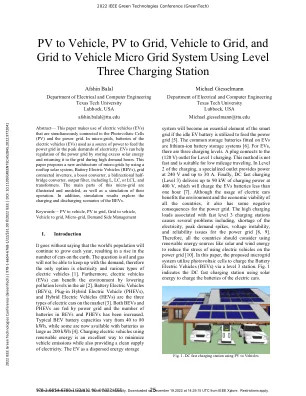
采用三级充电站的光伏到汽车、光伏到电网、汽车到电网和电网到汽车微电网系统
摘要 — 本文利用同时连接到光伏电池 (PV) 和电网的电动汽车 (EV)。在微电网中,电动汽车 (EV) 的电池用作电源,在电力需求高峰时为电网供电。电动汽车可以通过储存多余的太阳能并在高需求时段将其返回电网来帮助调节电网。本文提出了一种新的微电网架构,使用屋顶太阳能系统、电池电动汽车 (BEV)、电网连接逆变器、升压转换器、双向半桥转换器、输出滤波器(包括 L、LC 或 LCL)和变压器。本文说明了并建模了该微电网的主要部分,并对其运行进行了模拟。此外,模拟结果探讨了 BEV 的充电和放电场景。关键词——光伏到汽车,光伏到电网,电网到汽车,汽车到电网,微电网,需求侧管理I. 引言毋庸置疑,世界人口每年都会持续增长,从而导致地球上的汽车数量增加。问题是石油和天然气无法满足需求,因此唯一的选择就是电力和各种类型的电动汽车 [1]。此外,电动汽车 (EV) 可以通过降低空气污染水平造福环境 [2]。电池电动汽车 (BEV)、插电式混合动力电动汽车 (PHEV) 和混合动力电动汽车 (HEV) 是市场上的三种电动汽车类型 [3]。BEV 和 PHEV 都由电网供电,并且 BEV 和 PHEV 中的电池数量有所增加。典型的 BEV 电池容量从 40 到 80 kWh 不等,而现在有些电池容量高达 200 kWh [4]。使用可再生能源为电动汽车充电是减少汽车排放并提供清洁电力供应的绝佳方式。电动汽车作为分散式储能系统

2022 年车辆追击指南
为了寻求《车辆法》§17004.7 中规定的豁免权,机构必须采用并颁布关于车辆追捕的书面政策(本指南文件中指定的主题)。机构还必须每年定期和定期培训其追捕政策,并定期评估其政策、实践和培训。机构必须确保公共机构的所有治安官都签名确认他们已收到、阅读并理解该政策。最近的判例法对机构提供 100% 遵守此书面证明文件的能力提出了质疑。虽然 100% 合规性尚未导致机构失去豁免权,但强烈建议每个机构确保每位治安官都接受过培训并签署了证明。应保留反映 100% 合规性的记录。
人工智能和机动车机构
德勤咨询是一家全球专业服务公司,提供广泛的服务,包括人工智能和数据分析解决方案,帮助客户应对复杂的业务挑战和机遇。德勤与政府机构合作实施人工智能解决方案,以改善公民服务、优化运营和增强决策能力,并通过各种方式协助我们的客户利用人工智能的力量:
您的车辆,我们的导航
当您的蚂蚁驱动车辆到达客户的网站时,您的团队的第一份工作将是确保其蚂蚁导航系统正确理解车辆的特定参数。此步骤很重要,因为在运输过程中,可以轻松地将车辆的组件(例如蚂蚁用于定位的LiDAR激光扫描仪)轻易地脱离对齐。

非公路电动汽车解决方案
用户必须独立评估所选产品是否适合其特定应用,并针对这些应用测试产品。用户应自行负责根据自己的性能标准、条件、特定应用、与其他部件的兼容性以及环境条件确定产品是否适合特定系统或用途。用户必须独立提供适当的设计和操作保护措施,以最大程度地降低与其应用和产品相关的风险。Littelfuse 产品并非为所有应用而设计,也可能无法用于所有应用。请访问 littelfuse.com/disclaimer-electronics 阅读完整的免责声明。
COVID-19国家安全计划
在轻型车行业中,通过特斯拉,通用汽车,Google等公司的工作,车辆自动化的开发正在进行中。虽然轻型车辆空间的进度取得了显着进展,但仍处于起步阶段的特定重型车辆。尽管如此,许多将重型车辆自动化的基础系统将来自轻型车辆的开发以及当前使用的高级驾驶员辅助系统的成熟。因此,必须监控这些发展,并为该领域的监管发展做出贡献。