XiaoMi-AI文件搜索系统
World File Search SystemVis

显示 - Max-AI
Max-AI® VIS(视觉识别系统)可实时识别可回收物,是一种监控整个系统材料成分的经济有效方法。Max-AI 技术采用视觉系统和多层神经网络来查看和识别物体,方式与人类相似。Max-AI VIS 可用于验证最终产品的质量,或分析离开系统的残留物。

一切 - max-ai.com
Max-AI® VIS(视觉识别系统)可实时识别可回收物,是一种经济高效的监控整个系统材料成分的方法。Max-AI 技术采用视觉系统和多层神经网络来观察和识别物体,其方式与人类相似。Max-AI VIS 可用于验证最终产品的质量,或分析离开系统时的残留物。
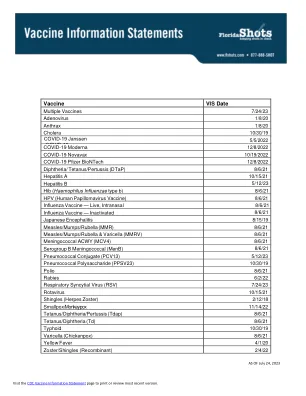


多种儿科疫苗 VIS
脊髓灰质炎 脊髓灰质炎(或小儿麻痹症)是一种由脊髓灰质炎病毒引起的致残且可能致命的疾病,该病毒可感染人的脊髓并导致瘫痪。大多数感染脊髓灰质炎病毒的人没有任何症状,而且许多人康复后没有并发症。一些感染脊髓灰质炎病毒的人会出现喉咙痛、发烧、疲倦、恶心、头痛或胃痛的症状,大多数出现这些症状的人也会康复,不会出现并发症。一小部分人会出现更严重的症状:感觉异常(腿部刺痛感)、脑膜炎(脊髓和/或大脑覆盖物感染)、瘫痪(无法移动身体部位)或手臂、腿部或两者无力。瘫痪可能导致永久性残疾甚至死亡。

多种儿科疫苗 VIS
脊髓灰质炎 脊髓灰质炎(或称小儿麻痹症)是一种由脊髓灰质炎病毒引起的致残和危及生命的疾病,脊髓灰质炎病毒可感染人的脊髓,导致瘫痪。大多数感染脊髓灰质炎病毒的人没有任何症状,许多人康复后不会出现并发症。一些感染脊髓灰质炎病毒的人会出现喉咙痛、发烧、疲倦、恶心、头痛或胃痛,大多数出现这些症状的人也会康复,不会出现并发症。一小部分人会出现更严重的症状:感觉异常(腿部有针刺感)、脑膜炎(脊髓和/或大脑覆盖物感染)、瘫痪(无法移动身体部位)或手臂、腿部或两者无力。瘫痪可能导致永久性残疾和死亡。

VIS RSV 英语 10.17.2024
CDC 建议孕妇在怀孕第 32 周至第 36 周期间接种一次 RSV 疫苗,以预防婴儿在出生后前 6 个月内感染 RSV 疾病。建议美国大部分地区从 9 月到 1 月接种此疫苗。但是,在某些地区(例如,领地、夏威夷、阿拉斯加和佛罗里达州部分地区),接种疫苗的时间可能因该地区 RSV 的流行时间而异。

VIS 霍乱 英文 10.17.2024
为了让医疗保健提供者获得准确的免疫状态信息、免疫评估和未来免疫接种的建议时间表,信息将发送到密歇根州护理改进登记处。个人有权要求医疗保健提供者不要将免疫信息转发给登记处。
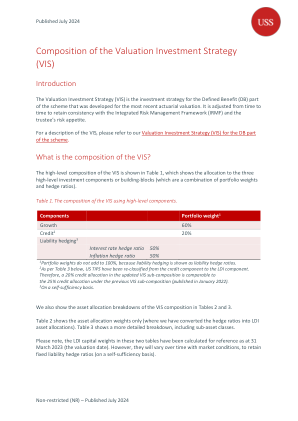
估值投资策略(VIS)的组成
1 投资组合权重加起来不等于 100%,因为负债对冲显示为负债对冲比率。2 根据下表 3,美国 TIPS 已从信贷部分重新分类为 LDI 部分。因此,更新后的 VIS 子组合中 20% 的信贷分配与之前的 VIS 子组合(2022 年 1 月发布)下的 25% 信贷分配相当。3 基于自给自足。我们还在表 2 和表 3 中展示了 VIS 组合的资产配置细目。表 2 仅显示资产配置权重(我们已将对冲比率转换为 LDI 资产配置)。表 3 显示了更详细的细分,包括子资产类别。请注意,这两个表中的 LDI 资本权重是根据 2023 年 3 月 31 日(估值日)计算得出的,仅供参考。但是,它们会随着市场情况的变化而变化,以保持固定的负债对冲比率(以自给自足为基础)。

下一代仪器仪表 - Ametek VIS
METEK Dixson 的全数字 NGI 多路复用仪表系统采用了最新的技术和制造工艺。该系统可靠且可扩展,可用于任何车辆或固定位置应用。高度模块化的 NGI 系统在设计时充分考虑了未来的适应性。指针、刻度盘和边框设计允许简单且廉价地进行外观更改或更新。所有仪表共用的内部结构和零件可最大程度降低成本,而菊花链电缆连接与浅深度外壳相结合,可最大程度地减少仪表板后的空间要求。仪表和模块连接到车速表中的系统控制单元并由其控制,以最大程度地减少车辆数据总线的负载。仪表具有光导管、车辆使用寿命 LED 背光、尖端到轮毂照明指针、270° 指针偏转和易于阅读的图形。指针由精密步进电机驱动,这种电机长期以来以耐用性和准确性而闻名。每个仪表中的红色警告 LED 减少了专用指示器的数量。明亮的橙色指针和黑底白字图形是标准配置;其他方案也可用。英制、北美自由贸易协定和公制刻度,带或不带子刻度均可根据要求提供。仪表安装在标准的 2 英寸、3 英寸和 5 英寸切口中。NGI 系统具有自校准和自测试功能,完全免维护。