XiaoMi-AI文件搜索系统
World File Search Systemaltitude
MggQfUS - 子弹选择器
备注 首次观察到安装在 MIG-2 F q x 蝙蝠飞机上(每架飞机 4 枚),据报道安装在 SU-19 飞机上。在 MIG-25 上,携带 4 枚 Acrid 导弹;2 枚 IR 内置和 2 枚 SAR 外置。SAR 目标由细长翼尖吊舱中的 CW 天线照亮。大机翼旨在提供高空机动性。(这种导弹最初设计用于杀死高空轰炸机)。SAR 接收天线比 Sparrow 的天线大,与 Phoenix 天线非常接近。
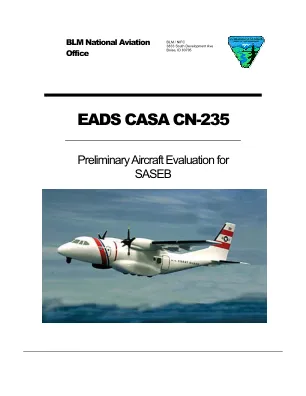
EADS CASA CN-235 - 国家跨部门消防中心
大型货舱和飞行中可操作的后部坡道可轻松装载大件货物,包括标准的 88''x108'' 货盘、轻型车辆或战斗机发动机。CN-235 可以使用低空 (LAPES) 或高空投送 (HAD) 技术进行空投。最多可运载 51 名伞兵,并通过两个后侧门或后部坡道在短时间内完成投送。对于医疗后送任务,它最多可容纳 21 张北约标准担架,并配备四名陪护人员。

太空 ADS-B 升空 - DigitalOcean
• 通过降低最小间隔标准来改善服务 • 扩大用户首选航线、高度和(成本指数)速度的访问权限 • 扩大 ADS-B 监视覆盖范围并提高邻近 FIR 的可见性 • 减少日常维护、天气和系统故障的影响 • 通过增强或更换现有基础设施来降低监视成本 • 提高安全性、法规遵从性和管制员态势感知能力 • 加快管制员对异常情况、严重导航错误和搜索救援行动的响应时间 • 准确的飞机运动、速度和高度数据以便更好地进行分析

RelyEZ GridUltra 系列 - 4.18MWh (0.25P) 和 5.016 ...
≤2000 m/<3000 m (≤6561.68 ft/<9842.52 ft) 可用,降额应用海拔

StratXX 飞艇和浮空器
StratXX 飞艇和浮空器 Peter Lobner,2022 年 3 月 10 日更新 1. 简介 StratXX Holding AG 由 Kamal Alavi 于 2005 年在瑞士创立。 StratXX 领导一个团队开发了一个高空平台站 (HAPS),设计用于在约 21 公里(68,898 英尺)的平流层运行。 HAPS 可配置为执行各种任务,包括电信广播和蜂窝服务,以及一系列地球观测、本地地面定位和国家安全服务。战略合作伙伴包括苏黎世和洛桑联邦理工学院、RUAG 航空航天、纳沙泰尔大学、德国航天局 (DLR) 和约克大学(英国)。在其运行高度,HAPS(称为 X-Station)的服务区直径约为 1,000 公里(621 英里)。 X-Station 的第一个商业应用是作为提供 3G/4G 无线通信和数字广播服务的平台。StratXX 还开发了其他无人驾驶轻于空气的飞行器:

AeroCruze 230 高级触摸屏,2 轴或 3 轴自动驾驶仪
AeroCruze 230 自动驾驶仪由自动驾驶仪面板上的一组混合控件操作,使用双同心旋钮、软按钮、触摸屏显示器以及一组专用控件。专用旋钮/按钮功能专为频繁使用的功能而设计。自动驾驶仪触摸屏按钮控制一般功能的启用/禁用,并控制横向和垂直模式。面板软触摸上/下按钮控制空速/垂直速度目标、俯仰参考和 ALT 模式下的精细高度调整。高度选择旋钮用于预选所需高度。
CleanSpace WORK 用户说明 EN
• This product is part of a system that helps protect against certain airborne contaminants. Misuse may result in sickness. For proper use, consult an Occupational Health Specialist, these User Instructions or contact CleanSpace Technology Customer Support on support@cleanspacetechnology.com. • Properly selected, used and maintained respirators help to protect against certain airborne contaminants. It is essential to follow all instructions and government regulations on the use of this product, including wearing the complete respirator system during all times of exposure, in order for the product to help protect the wearer. Misuse of respirators may result in overexposure to contaminants and lead to sickness. For proper use, consult an Occupational Health Specialist, these User Instructions or contact CleanSpace Technology Customer Support on support@cleanspacetechnology.com or the website: cleanspacetechnology.com. • You must recalibrate the internal pressure sensor any time that your CleanSpace Respirator is exposed to changes in temperature of more than 20°C, changes in altitude of more than 100m or before using the respirator for the first time. It is best practice to also recalibrate if the unit has been in storage, particularly if the storage temperature is not known.
国防部接口标准
5.3.1.1 边界八边形和框架。........................................................................... 9 5.3.1.2 边界八边形和图标/修饰符 ........................................................................ 11 5.3.2 框架 ........................................................................................................... 11 5.3.2.1 标准标识。.................................................................................................. 15 5.3.2.2 域 .................................................................................................................. 15 5.3.2.3 状态。.................................................................................................... 15 5.3.3 填充 ............................................................................................................. 16 5.3.4 图标 ............................................................................................................. 18 5.3.4.1 主图标。................................................................................................................ 18 5.3.4.2 全八边形图标。........................................................................................................ 18 5.3.4.3 全框架图标。.................................................................................................... 18 5.3.5 修饰符。............................................................................................................. 19 5.3.6 放大器 ............................................................................................................. 19 5.3.6.1 梯队指示器 ............................................................................................. 23 5.3.6.2 安装指示器。............................................................................................. 24 5.3.6.3 特遣队指示器。................................................................................................ 24 5.3.6.4 假动作/假指标 .............................................................................................. 24 5.3.6.5 偏移位置放大器 .............................................................................................. 24 5.3.6.6 高度/深度修正器。........................................................................... 27 5.3.6.11 文本修改器。................................................................................................ 25 5.3.6.6.1 高度基准点 .............................................................................................. 25 5.3.6.6.2 相对高度 .............................................................................................................. 25 5.3.6.6.3 飞行高度层 .............................................................................................................. 25 5.3.6.6.4 高度/深度修正器的多个实例 ............................................................................. 25 5.3.6.7 日期时间组。.................................................................................................... 26 5.3.6.8 运动方向放大器 ............................................................................................. 26 5.3.6.9 移动指示器 ............................................................................................. 26 5.3.6.10 辅助设备指示器。.................................................................................................... 28 5.3.6.12 动态图形放大器 .......................................................................................... 28 5.3.6.12.1 不确定面积放大器。...................................................................................... 30 5.3.6.12.1.1 椭圆AOU放大器 ...................................................................................... 30 5.3.6.12.1.2 轴承箱AOU放大器 ................................................................................ 30 5.3.6.12.1.3 轴承线AOU放大器。.................................................................... 30 5.3.6.12.2 航位推算拖车放大器 .............................................................................. 30 5.3.6.12.2.1 线路 DR 拖车放大器 .............................................................................. 30 5.3.6.12.2.2 最远圆 DR 拖车放大器 ...................................................................... 30 5.3.6.12.3 速度领先放大器 ...................................................................................... 30 5.3.6.12.4 配对线路放大器 ...................................................................................... 31