XiaoMi-AI文件搜索系统
World File Search Systemconcurrently
NMCCA 简要处置
但是,我们注意到,判决书中没有说明根据军事法庭规则 (R.C.M.) 的要求,对指控判处的监禁是连续执行还是同时执行1111(b)(2)(B)。4 虽然我们认为没有偏见,但上诉人有权获得正确反映其诉讼内容的军事法庭记录。5 根据 R.C.M.1111(c)(2),我们修改判决书并指示将其纳入记录。
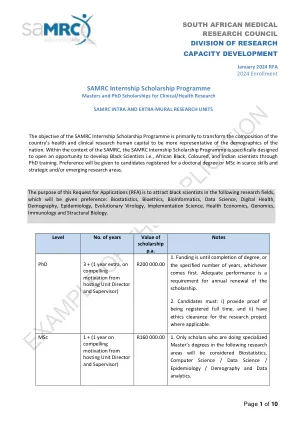
SAMRC实习奖学金计划
•预计奖学金持有人将至少花费90%的时间进行研究。•教学和临床活动可能不超过学者的10%以上。•奖学金持有人不得与该奖学金,其他助学金,赠款或报酬同时收到,而这些奖学金,赠款或报酬,而无需SAMRC事先达成协议,就可以将他们绑定到任何组织的服务。•在任何给定时间,候选人不得从一个以上的南非政府或法定实体中保留助学金。•奖学金持有人可能不会同时获得此奖学金,其他非约束力薪酬/奖学金,以及未经SAMRC事先同意的赠款。•如果未寻求SAMRC的批准,奖学金持有人可能不会在提交申请提交申请的大学以外的大学注册。•一旦获得奖学金,奖学金持有人就不会在不通知SAMRC的情况下更改其主管或研究项目。•学者将提交主管认可的六个月的进度报告。•将每年考虑续签资金的申请,并将其成功取得令人满意的进展。•成功的申请人将被要求与SAMRC达成协议,以在指定期间完成他们的研究。

现在利用人工智能软件进行乳房X光检查
我们已经确定,通过利用该软件作为辅助工具,患者可能会受益于更高的准确性、更快的结果和更低的召回率。该软件旨在与放射科医生同时工作,而不是作为独立选项。约翰霍普金斯大学已经在使用计算机辅助检测软件,因为这是行业标准,这款人工智能软件是一种更先进的选择,使我们能够继续提供高质量的患者护理。
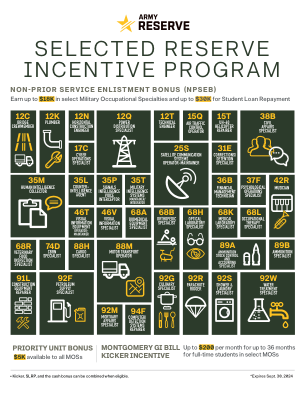
选定的预备役激励计划
SLRP 和现金奖金可以合并。士兵必须符合奖金资格和 DMOSQ 才能获得 SLRP。对于 Will-Train 奖励,获得奖励的指挥官必须在士兵完成 C-2 重新入伍(陆军预备役训练选项)之前确认训练席位的可用性。所有其他 MOS 的 6 年期选项最高可获得 10,000 美元。与现金奖金同时提供的 5,000 美元优先单位奖金 (PUB)。


不确定性意识到的预测和在自动驾驶计划中的应用:定义,方法和比较
摘要 - 自主驾驶系统面临着不确定性的复杂和动态环境的巨大挑战。这项研究提出了一个统一的预测和计划框架,同时建模短期的息肉不确定性(SAU),长期的不良不确定性(LAU)和认知不确定性(EU),以预测和建立在动态环境中计划的强大基础。该框架使用高斯混合模型和深层集合方法,同时捕获和评估SAU,LAU和EU,在传统方法不会同时整合这些不确定性。此外,考虑了各种不确定性,还引入了不确定性感知计划。与现有方法相比,研究的贡献包括不确定性估计,风险建模和计划方法的比较。使用CommonRoad基准和设置有限的感知,对所提出的方法进行了严格评估。这些实验阐明了自主驾驶过程中不同不确定性因素的优点和作用。此外,对各种不确定性建模策略的比较评估强调了建模多种类型不确定性的好处,从而提高了计划的准确性和可靠性。所提出的框架促进了UAP方法的开发,并超过了现有的不确定性风险模型,尤其是在考虑各种交通情况时。项目页面:https://swb19.github.io/uap/。

评估牡蛎礁作为栖息地:催化未来的管理应用研究
基金会物种,例如东部牡蛎(Crassostrea virginica),可提供许多生态功能,并在沿海环境中提供无数的生态系统服务,包括作为NERR系统储备中各种生物体的重要栖息地。我们的合作团队同时部署了多种已建立和新兴的方法,以在北卡罗来纳州(NC),南卡罗来纳州(Ni-WB),乔治亚州(SI)和佛罗里达州(GTM)中在北卡罗来纳州(NC),南卡罗来纳州(NI-WB)的储量中进行潮间带牡蛎礁进行采样。