XiaoMi-AI文件搜索系统
World File Search Systemcontainers


IBM MQ在容器中
Allowed values for .spec.version during migration 9.3.0.0-r1, 9.3.0.0-r2, 9.3.0.0-r3, 9.3.0.1-r1, 9.3.0.1-r2, 9.3.0.1-r3, 9.3.0.1-r4, 9.3.0.3-r1, 9.3.0.4- r1, 9.3.0.4-r2, 9.3.0.5-r1, 9.3.0.5-r2, 9.3.0.5-r3, 9.3.0.6-r1, 9.3.0.10-r1, 9.3.0.10-r2, 9.3.0.11-r1, 9.3.0.11-r2, 9.3.0.15-r1, 9.3.0.16-r1, 9.3.0.16-r2, 9.3.0.17-r1, 9.3.0.17-r2, 9.3.0.17-r3, 9.3.0.20-r1, 9.3.0.20-r2, 9.3.0.21-r1, 9.3.0.21-r2, 9.3.0.21-r3, 9.3.0.25-r1, 9.3.1.0-r1, 9.3.1.0-r2, 9.3.1.0-r3, 9.3.1.1-r1, 9.3.2.0-r1, 9.3.2.0-r2,9.3.2.1-r1,9.3.2.1-r2,9.3.3.0-r1,9.3.3.3.0-r2,9.3.3.1-r1,9.3.3.3.1-r2,9.3.3.33.2-r1,9.3.3.3.2-r2,9.3.33.3.3.3.3.3.3.3.3.3.3.3.3.3.3.3.granial 9.3.5.0-r2, 9.3.5.1-r1, 9.3.5.1-r2, 9.4.0.0-r1, 9.4.0.0-r2, 9.4.0.0-r3, 9.4.0.5-r1, 9.4.0.5-r2, 9.4.0.6-r1, 9.4.0.6-r2, 9.4.0.7-r1, 9.4.0.10-r1, 9.4.1.0-r1, 9.4.1.0-r2,9.4.1.1-r1

散装储存容器 (BSC)
腐蚀可能会削弱结构完整性并导致泄漏和/或溢出,从而对环境造成潜在威胁。添加或取出燃料时,油箱的内部压力将是一个问题,因此需要使用通风口。油箱会因压差而突然失效。由于采用单壁结构,倾倒和穿孔也是问题所在。
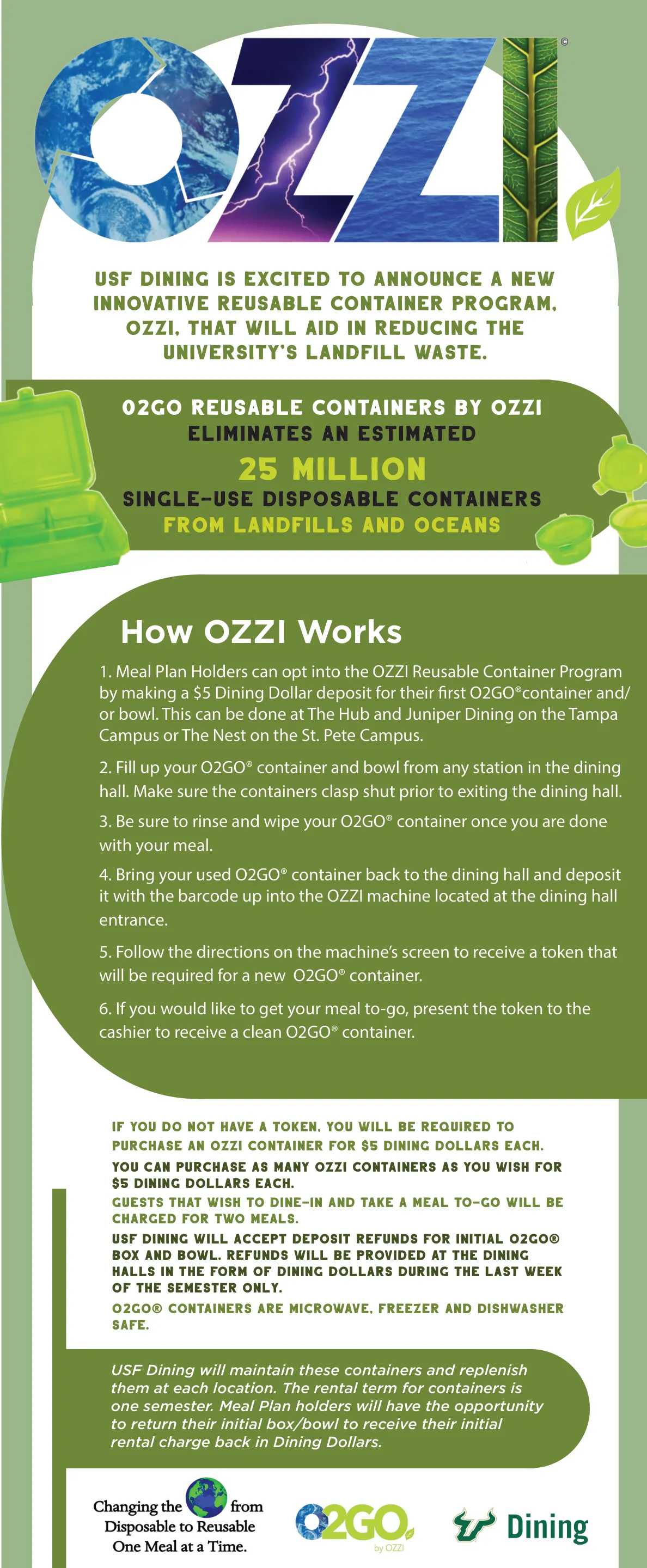
02GO OZZI 可重复使用容器
USF Dining 将保管这些容器并在各个地点进行补充。容器的租赁期限为一个学期。膳食计划持有者将有机会归还其最初的盒子/碗,以餐饮费的形式收回其最初的租赁费。
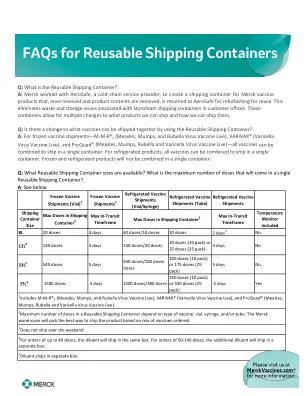
可重复使用运输容器的客户常见问题解答
可重复使用运输容器的常见问题(续)问:可重复使用运输容器的较长运输时间有什么好处?答:通常情况下,2 天内即可收到货物。可重复使用运输容器的另一个特点是,货物可以在周末运输。这使得在疫苗接种高峰季节的运输更加灵活。问:什么是稀释剂运输容器?它是什么样子的?它可重复使用吗?答:稀释剂运输容器将用于仅稀释剂订单,或与 12L(适用于 50-140 剂的订单)、33L 和 77L 可重复使用运输容器中发送的冷冻货物一起使用。稀释剂运输容器的外观与可重复使用运输容器相似;但是,客户无需将稀释剂运输容器退还给 AeroSafe 重新使用。它可以像任何其他纸板箱一样处理掉。
货运集装箱指南 - 韩国注册
可根据缔约国政府授予的权力和国内法律法规,按照《1972 年国际集装箱安全公约》(以下简称“CSC 公约”)、UIC 规则 590 和 592-3 的规定、《1975 年 TIR 证下的国际货物运输海关公约》(以下简称“TIR 公约”)和《1972 年集装箱海关公约》的规定进行指导。

在容器中运输电动汽车(EV)
随着世界变得越来越了解气候变化和全球变暖的人们正在重新评估他们对越来越多的日常商品的方法,因此在容器中运输电动汽车(EV)。这样的商品是一种电动汽车,在世界许多地方,现在被用作环保替代品,用于更传统的传统,传统燃料的汽车。全世界人们都在调整购买习惯,以支持这一值得的事业。证明了这种不断增长的防止全球变暖的趋势,该俱乐部已经收到了许多有关集装箱中电动汽车(EV)运输的询问。该文件旨在为信息收集提供指导,考虑到在容器船上的容器中携带EV时进行尽职调查和风险评估时应考虑的信息。考虑船只的主人有义务确保船舶的安全,所有船上,货物和海洋环境的安全。船东的义务扩展到了一艘船舶的船舶,并确保将货物安全运输到其在出院港口的运输。应该认识到,尽管船东依靠托运人提供准确的货物声明,但还希望船东在确保其船只的安全和所有这些船的安全方面承担自己的尽职调查。新型的货物和新颖的携带方式可能会带来新的风险。应始终正确识别,评估和减轻这些风险,从而尽可能低。这一点尤其重要,担心这些风险可能无法通过现有的监管标准和行业准则来充分解决。在这些情况下,承运人可能有必要考虑采取其他安全措施和检查以减轻确定的风险,直到可以使用更多信息,知识,经验,统计数据或预防措施等时间来支持重新评估这些风险。不断增加的全球需求(增加的货物)电动汽车市场正在看到指数增长,销售额超过2022年,主要汽车市场的市场趋势和政策努力支持了IEA报告未来EVS销售的明亮前景。随着对电动汽车的需求的增长,海上运输的需求也将影响船东的风险曝光。