XiaoMi-AI文件搜索系统
World File Search Systemlasercom
激光通信是建立太空互联网的关键
联合全域指挥与控制 (JADC2) 是由国防部开发的概念,旨在将各军种的传感器连接到一个由人工智能驱动的统一网络中。JADC2 的一个关键目标是将各种传感器收集的数据近乎实时地连接到所有五个作战域(陆地、海洋、空中、太空和网络空间)的射手。为了实现这一愿景,五角大楼已责成太空发展局 (SDA) 创建一个称为“传输层”的全球通信网络,该网络将在低地球轨道 (LEO) 卫星之间传递信息,从而为 JADC2 创建近乎实时的通信网络。为了实现 JADC2 愿景,SDA 必须创建一个近乎实时的通信网络,该网络具有高带宽、以光速移动且难以拦截或干扰。这就需要激光通信。

NICT 适用于移动平台的多功能微型激光通信终端
摘要 —为了满足从小型无人机到大型卫星等多种不同类型平台的多样化需求,并应用于从固定地面链路到一般移动平台等各种场景,并在各种条件和距离内运行,日本国家信息和通信技术研究所 (NICT) 目前正致力于开发一系列多功能微型自由空间激光通信终端。通过为任何给定场景选择适当的终端配置,无需定制即可满足基本操作条件,并且终端的自适应设计可以缩小差距,以实现满足通信要求的最佳解决方案。本文介绍了 NICT 目前在开发该系列激光通信终端方面的努力,并介绍了为验证和测试目的而开发的首批原型。

引文 Davé, PK 和 Cahoy, K. 2020. “利用卫星间激光通信实现自主卫星导航。”宇航科学进展
本研究探讨了使用激光通信 (lasercom) 卫星间链路获取自主导航的相对位置测量值。激光通信交联链路有可能提供卫星间距离和方位测量值,以便在各种轨道情况下准确导航卫星,包括 GNSS 拒绝、GNSS 受限和深空环境。在低地球轨道 (LEO)、地球静止轨道 (GEO)、高椭圆轨道 (HEO) 和火星轨道星座的示例应用案例中,使用数值模拟将激光通信交联方法与传统定位和导航方法进行比较。在地球轨道上使用激光通信测量会导致 LEO 上的误差为 2 米,GEO 上的误差为 10 米,HEO 上的误差为 50 米,与当前基于 GNSS 的导航误差相当。采用所提导航方法的火星轨道器群定位误差为 10 米,与目前 DSN 导航误差相当(当 DSN 操作可用时),并且优于 DSN 数据间隙期间传播的状态知识。使用卫星间激光通信系统进行轨道测定还可以减少对地面跟踪和导航系统的依赖,从而提高太空任务的自主性。

自由空间激光通信的进展
《IEEE 量子电子学选题期刊》(JSTQE)邀请自由空间激光通信进展方面的论文投稿。自由空间激光通信这一新兴领域利用庞大的地面光纤行业以及最近大量廉价太空发射,成为解决太空星座交叉链路、高带宽数据下行链路和载人航天通信需求的现实解决方案。随着全球多个组织继续在该领域进行技术开发和系统设计创新,lasercom 有望在不久的将来继续彻底改变太空通信领域,为通信瓶颈以及系统尺寸、重量和功率限制提供独特的解决方案。《IEEE 量子电子学选题期刊》邀请自由空间激光通信领域的论文投稿。本期 JSTQE 旨在重点介绍开发尖端 lasercom 技术的最新进展和趋势。感兴趣的领域包括(但不限于):

用于太空平台的多个同步光学链路
太空自由空间光通信 (FSOC),或称激光通信,在带宽、尺寸、重量、功耗节省以及不受管制的频谱方面,比射频 (RF) 通信具有关键优势。与 RF 通信相比,理论和演示的激光通信系统在 SWaP 相似或相同的情况下,数据速率更高。新的太空网络架构,例如 SpaceX 和 Telesat 等公司目前正在部署的宽带星座,利用光学卫星间链路来提高系统总吞吐量并减少地面站数量,从而降低整体系统成本。除了 LEO 之外,Artemis 计划基础设施还包括猎户座太空舱和地球之间的光通信中继,最终计划扩展到月球轨道器以实现连续表面覆盖。尽管性能优势明显且在各个应用中的采用率不断提高,但最先进的 RF 通信系统目前的表现优于激光通信系统,部分原因是光通信系统无法支持多个同时链路。频率重用、访问方法和动态波束形成等技术使 RF 通信系统能够绕过带宽限制并与网络内的其他节点(例如多个地面站、用户终端等)建立同时链接。这项工作着眼于将此功能扩展到激光通信系统,评估支持多个同时光链路所需的技术,并量化网络配置中多用户激光通信的影响。我们开发了一个模型来模拟这种系统的性能,并根据现有模型和数据对其进行验证。然后将该模型应用于 LEO 和深空网络场景,该场景分析不同的访问方法、网络配置和终端技术,例如光纤放大器与光子集成电路。我们进行权衡研究以确定所提方法的局限性和约束。然后,我们根据关键性能参数为每种场景提出架构建议。例如,我们发现对于 LEO 情况,一组四颗 6U 立方体卫星可以在网状网络配置中通过波分多址实现 12 Gbps 的总系统吞吐量。此外,通过使用基于光子的收发器而不是基于光纤的收发器,可以额外节省约 2.5 倍的质量。

hgcdte apds检测器的开发在CEA/LETI的大气激光雷达和空间光学通信
HGCDTE APD检测器模块电信是在CEA/LETI上开发的,用于大气刺激和自由空间光学(FSO)。开发是由可以在每个检测器模块中调整的通用子组件的设计和制造驱动的,以满足每个应用程序的特定检测器要求。从目前为大气激光雷达开发的探测器模块所设定的挑战详细介绍了此类子组件的优化,该挑战在AIRBUS的R&T CNES项目的范围内以及H2020 Project holdon的R&T项目范围以及FSO,以及在ESA项目的范围内与Mynaric Laserc的lasercom lasercom gmbhhs of airbus和FSO。最近已将两个检测器模块传递到空中客车DS进行广泛的LIDAR仿真测试。表明,与先前开发的大面积检测器相比,输入噪声,NEP = 10-15fw/√Hz(5个光子RMS)已减少了三分,尽管带宽已增加到180 MHz,以响应高空间深度分辨率的要求。在发现短光脉冲后200 ns时,时间延迟为10 -4,这与诸如测深分析之类的激光雷达应用兼容。
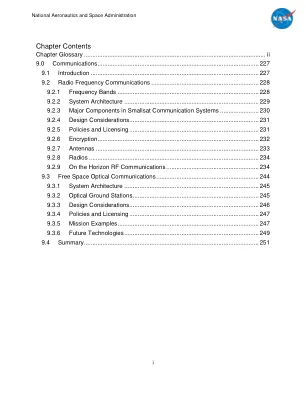
最新报告中的通信章节
通信系统是航天器的重要组成部分。对于大多数任务,通信系统使航天器能够将数据和遥测数据传送到地球,接收来自地球的指令,并将信息从一个航天器传递到另一个航天器。通信系统由地面部分组成:位于地球上的一个或多个地面站,以及空间部分:一个或多个航天器及其各自的通信有效载荷。通信系统的三个功能是接收来自地球的指令(上行链路)、将数据传送到地球(下行链路)以及从另一颗卫星发送或接收信息(交联或卫星间链路)(图 9.1)。通信系统有两种类型:射频 (RF) 和自由空间光 (FSO),FSO 也称为激光通信 (lasercom)。

IAC-21-B2.2 第 1 页,共 5 页 IAC-21-B2.2 开发...
摘要 自由空间光通信正在成为一项成熟的技术,近几年已在太空中进行了多次演示。日本国家信息通信技术研究所 (NICT) 在过去三十年中进行了多项最重要的在轨演示。然而,这项技术尚未得到广泛的商业应用。为此,NICT 目前正致力于开发一种小型激光通信终端,该终端可安装在超小型卫星上,同时还兼容各种其他不同平台,满足广泛的带宽要求。该设计采用的策略是创建一个多功能激光通信终端,无需大量定制即可在多种场景和平台上运行。本文介绍了 NICT 目前为开发该终端所做的努力,并展示了已经为初步测试开发的原型,并对其进行了描述。这些测试将首先包括使用无人机进行性能验证,目的是将原型安装在高空平台系统 (HAPS) 上,以建立 HAPS 与地面之间的通信链路,然后与地球静止轨道 (GEO) 进行通信,从而覆盖广泛的操作条件。对于这些测试,在前一种情况下,无人机的终端是一个简单的发射器,而 HAPS 的终端是可移动的地面站;在后一种情况下,终端是 GEO 卫星 ETS-IX,预计 NICT 将于 2023 年发射。关键词:自由空间光通信、无线通信、空间激光通信、小型化终端
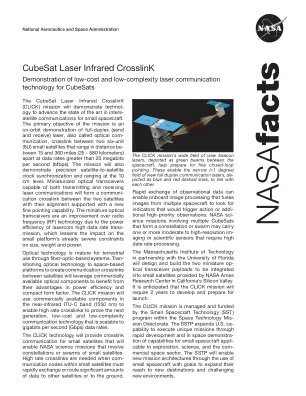
CubeSat 激光红外交联
立方体卫星激光红外交联 (CLICK) 任务将展示推动小型航天器星间通信技术发展的最新技术。该任务的主要目标是在轨演示两颗六单元 (6U) 小型卫星之间的全双工(发送和接收)激光交联,也称为光通信,两颗卫星之间的距离在 15 至 360 英里(25 - 580 公里)之间,数据速率超过 20 兆比特每秒 (Mbps)。该任务还将展示精确的卫星间时钟同步和 10 厘米级的测距。能够发送和接收激光通信的微型光学收发器将在两颗卫星之间形成通信交联,并通过新的精细指向功能支持它们的对准。由于激光通信高数据速率传输的功率效率,微型光学收发器是对射频(RF)技术的改进,这减轻了对小型平台在尺寸、重量和功率方面已经很严格的限制的影响。