XiaoMi-AI文件搜索系统
World File Search Systemmems

应用于 GPS/INS 集成系统的 MEMS 不同误差建模之间的比较
摘要:微机电系统 (MEMS) 的发展进步使得制造廉价、小尺寸的加速度计和陀螺仪成为可能,它们被用于许多需要进行全球定位系统 (GPS) 和惯性导航系统 (INS) 集成的应用中,即,识别轨道缺陷、地面和行人导航、无人驾驶飞行器 (UAV)、许多平台的稳定等。虽然这些 MEMS 传感器成本低廉,但它们会出现不同的误差,从而在短时间内降低导航系统的准确性。因此,有必要对这些错误进行适当的建模,以尽量减少这些错误,从而提高系统性能。在本研究中,我们展示并比较了目前用于分析影响这些传感器的随机误差的最常用技术:我们详细研究了自相关、Allan 方差 (AV) 和功率谱密度 (PSD) 技术。随后,还实现了惯性传感器的分析和建模,其中结合了自回归 (AR) 滤波器和小波去噪。由于低成本 INS(MEMS 级)的误差源包括短期(高频)和长期(低频)分量,我们引入了一种通过对 Allan 方差、小波去噪和选择分解级别进行完整分析来补偿这些误差项的方法,以实现这些技术的适当组合。最后,为了评估使用这些技术获得的随机模型,扩展卡尔曼

使用贝叶斯推理实现 MEMS 最终模块测试中的可靠参数提取
摘要:在微机电系统 (MEMS) 中,高整体精度和可靠性测试至关重要。由于对运行效率的额外要求,近年来人们一直在研究机器学习方法。然而,这些方法通常与不确定性量化和可靠性保证方面的固有挑战有关。因此,本文的目标是提出一种基于贝叶斯推理的 MEMS 测试新机器学习方法,以确定估计是否可信。使用四种方法评估整体预测性能以及不确定性量化:贝叶斯神经网络、混合密度网络、概率贝叶斯神经网络和 BayesFlow。在训练集大小变化、不同加性噪声水平和分布外条件(即 MEMS 设备的阻尼系数变化)下对它们进行研究。此外,还评估和讨论了认知和随机不确定性,以鼓励在部署之前彻底检查模型,力求在 MEMS 设备的最终模块测试期间进行可靠和有效的参数估计。 BayesFlow 在预测性能方面始终优于其他方法。由于概率贝叶斯神经网络能够区分认知不确定性和随机不确定性,因此它们在总不确定性中所占的份额已得到深入研究。

真空密封硅光子 MEMS 可调环形谐振器,具有对耦合和相位的独立控制
摘要:环形谐振器是硅光子学中滤波器、光延迟线或传感器的重要元件。然而,目前工厂中还没有低功耗的可重构环形谐振器。我们展示了一种使用低功耗微机电 (MEMS) 驱动独立调节往返相位和耦合的加/减环形谐振器。在波长为 1540 nm 且最大电压为 40 V 的情况下,移相器提供 0.15 nm 的谐振波长调谐,而可调耦合器可以将直通端口处的光学谐振消光比从 0 调节到 30 dB。光学谐振显示出 29 000 的被动品质因数,通过驱动可以增加到近 50 000。MEMS 环在晶圆级上单独真空密封,能够可靠且长期地保护免受环境影响。我们循环机械致动器超过 4 × 10 9

MEMS 数字输出运动传感器超低功耗高满量程 3 轴“纳米”加速度计
表 1.设备摘要。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。1 表 2.引脚描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。8 表 3.机械特性 @ Vdd = 2.5 V,T = 25 °C,除非另有说明。。。。。。。。。。9 表 4.电气特性 @ Vdd = 2.5 V,T = 25 °C,除非另有说明。。。。。。。。。。。10 表 5.SPI 从机时序值。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。11 表 6.I2C 从机时序值。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。12 表 7.绝对最大额定值。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。13 表 8.串行接口引脚描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 表 9.串行接口引脚描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 表 10.SAD+读/写模式。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。18 表 11.当主机向从机写入一个字节时传输。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。18 表 12.当主机向从机写入多个字节时传输:。。。。。。。。。。。。。。。。。。。。。。。。。。。19 表 13.当主机从从机接收(读取)一个字节的数据时传输: 。。。。。。。。。。。。。19 表 14.。主设备从从设备接收(读取)多个字节数据时的传输 。.......19 表 15。寄存器地址映射。...........。。。。。。。。。。。。。。。。。。。。。。。。................23 表 16.CTRL_REG1 寄存器 .......。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。24 表 17.CTRL_REG1 说明 .....................。。。。。。。。。。。。。。。。。。。。。。。。....24 表 18.功率模式和低功耗输出数据速率配置 .......................24 表 19.正常模式输出数据速率配置和低通截止频率 ........25 表 20.CTRL_REG2 寄存器 ..............。。。。。。。。。。。。。。。。。。。。。。。。..............25 表 21.CTRL_REG2 描述 ..........。。。。。。。。。。。。。。。。。。。。。。。。.................25 表 22.高通滤波器模式配置 ......。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...26 表 23.高通滤波器截止频率配置 ...............................26 表 24.CTRL_REG3 寄存器 .........。。。。。。。。。。。。。。。。。。。。。。。。......................26 表 25.CTRL_REG3 描述 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.26 表 26.INT 1 和 INT 2 引脚上的数据信号 ..................。。。。。。。。。。。。。.........27 表 27.CTRL_REG4 寄存器 ............。。。。。。。。。。。。。。。。。。。。。。。。.................27 表 28.CTRL_REG4 描述 .......。。。。。。。。。。。。。。。。。。。。。。。。....................27 表 29.CTRL_REG5 寄存器 ..。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...28 表 30.CTRL_REG5 描述 .........。。。。。。。。。。。。。。。。。。。。。。。。。...... div>.........28 表 31.睡眠唤醒配置 .。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。...... div>............28 表 32.参考寄存器。....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。28 表 33.参考说明 ....< div> 。。。。。。。。。。。。。。。 < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 表 34.STATUS_REG 寄存器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 表 35.STATUS_REG 描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。29 表 36.INT1_CFG 寄存器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。30 表 37.INT1_CFG 描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。30 表 38.中断 1 源配置 ..........< div> 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。31 表 39.INT1_SRC 寄存器 ....< div> 。。。。。。。。。。。。。。。 < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。...... div>...31 表 40.INT1_SRC 描述 .。。。。。。。。 < /div>.....。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。31 表 41.INT1_THS 寄存器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。31 表 42.INT1_THS 描述。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。32 表 43.INT1_DURATION 寄存器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。32 表 44.INT2_DURATION 说明。....................。。。。。。。。。。。。。。。。。。。。。。。。32 表 45.INT2_CFG 寄存器 .....................。。。。。。。。。。。。。。。。。。。。。。。。.........32 表 46.INT2_CFG 描述 ............。。。。。。。。。。。。。。。。。。。。。。。。...............32 表 47.中断模式配置。.......。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33 表 48.INT2_SRC 寄存器。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。33

芯片粘接样品制备对 MEMS 传感器应用测量机械性能的影响
摘要 — 计算建模通常用于设计和优化电子封装,以提高性能和可靠性。影响计算模型准确性的因素之一是材料性质的准确性。特别是微机电系统传感器,通常对封装中材料性质的细微变化极为敏感。因此,即使由于样品制备方法或测试技术不同而导致的材料特性测量值出现微小变化,也会影响用于设计或分析传感器性能的计算模型的准确性。对于需要固化的材料,材料特性的挑战更大。例如,芯片粘接聚合物在制造过程中具有严格的固化曲线要求。这种固化条件通常很难在实验室中复制,并且用于材料特性分析的样品不一定代表最终产品中的实际组件。本研究调查了温度固化曲线、固化过程中施加的压力以及样品制备技术等参数对两种芯片粘接弹性体随温度变化的热机械性能的影响。使用动态机械分析和热机械分析等一系列技术测量芯片粘接材料的机械性能,包括弹性模量 (E)、热膨胀系数和玻璃化转变温度。分析针对与典型传感器应用相对应的宽温度范围进行。结果表明,样品制备和表征技术对测量有相当大的影响,从而通过计算建模得出不同的 MEMS 传感器性能预测。

与传感器,MEMS和纳米技术日历有关的国际会议
第五次ASAIA-PACIFIC COFERENCE上的换能器和微纳米技术(APCOT2010),西澳大利亚州珀斯,西澳大利亚州7/7 ~9 http://apcot2010.ee.uwa.uwa.edu.eedu.au/

双轴 MEMS 中的直方图形成和降噪 - ...
摘要。在许多应用中,对可靠、小型且低成本的三维成像系统的需求很大。对于汽车应用以及安全的人机协作等应用而言,有前途的系统是基于直接飞行时间原理的光检测和测距 (激光雷达) 系统。特别是对于覆盖大视野或长距离能力,以前使用的多边形扫描仪已被微机电系统 (MEMS) 扫描仪取代。最近的发展是用单光子雪崩二极管 (SPAD) 取代通常使用的雪崩光电二极管。与其他方法相比,将这两种技术结合到基于 MEMS 的 SPAD 激光雷达系统中有望显着提高性能并降低成本。为了区分信号和背景/噪声光子,基于 SPAD 的探测器必须通过累积多个时间分辨测量来形成直方图。本文提出了一种信号和数据处理方法,该方法考虑了直方图形成过程中 MEMS 扫描仪的时间相关扫描轨迹。基于立体视觉设置中使用的已知重建过程,推导出累积时间分辨测量的估计值,从而可以将其分类为信号或噪声。除了信号和数据处理的理论推导外,还在基于 MEMS 的概念验证 SPAD 激光雷达系统中通过实验验证了实现。© 作者。由 SPIE 根据知识共享署名 4.0 国际许可发布。全部或部分分发或复制本作品需要完全署名原始出版物,包括其 DOI。[DOI:10.1117/1.JOM.2.1.011005]

利用焦外扫描光学显微镜和深度学习方法进行 MEMS 高深宽比沟槽三维测量
摘要:高纵横比结构在 MEMS 器件中的重要性日益凸显。对高纵横比结构进行原位、实时关键尺寸和深度测量对于优化深蚀刻工艺至关重要。离焦扫描光学显微镜 (TSOM) 是一种高通量且廉价的光学测量方法,可用于关键尺寸和深度测量。迄今为止,TSOM 仅用于测量尺寸为 1 µ m 或更小的目标,这对于 MEMS 来说远远不够。深度学习是一种强大的工具,它可以利用额外的强度信息来提高 TSOM 的性能。在本文中,我们提出了一种基于卷积神经网络模型的 TSOM 方法,用于测量硅上单个高纵横比沟槽,其宽度可达 30 µ m,深度可达 440 µ m。进行了实验演示,结果表明,该方法适用于测量高纵横比沟槽的宽度和深度,标准偏差和误差约为一百纳米或更小。所提出的方法可应用于半导体领域。
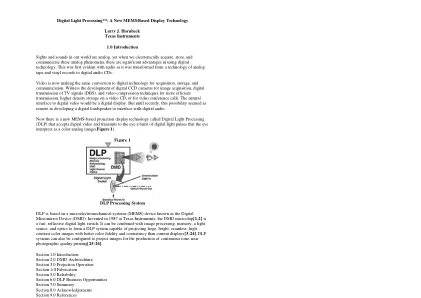
数字光处理™:一种基于 MEMS 的新型显示器...
为了帮助您彻底了解 D M D 像素结构及其处理方法,我们使用了几个图,包括爆炸视图、剖面视图和电气示意图。图 6 以爆炸视图的形式显示了图 4 中的像素结构,说明了各个层之间的关系,包括用于寻址像素的底层静态随机存取存储器 (SRAM) 单元。图 7 显示了 3 x 3 像素阵列的渐进剖面视图。图 8 描述了各层如何电气连接,并定义了必须施加到像素以实现正确开关动作的偏置和地址电压。D M D 像素是一个在 CMOS SR A M 单元上制造的单片集成 M E MS 上层结构单元。等离子体作为牺牲层,在上层结构的金属层之间形成空气间隙。空气间隙使结构可以自由旋转,绕两个柔性扭转铰链转动。镜子连接到下层轭架,轭架通过两个扭转铰链悬挂在支撑柱上。轭是静电的,被吸引到下面的轭地址选择的电极上。镜子是

Mubashir Bashir、Afnan Asad 和 Raof Ahmad Khan,“MEMS 技术 - 扩展优势和问题概述”,《国际科学杂志》
缩小尺寸是人们追求的目标。不幸的是,现实情况并非如此。确实,没有什么可以阻止人们缩小设备组件的尺寸,从而使设备变小。但是,缩小许多物理量会产生严重的物理后果。本文将介绍微机电系统 (MEMS) 中可用的缩放机制。它是一种技术,其最一般的形式可以定义为使用微加工技术制造的微型机械和机电元件(即设备和结构)。MEMS 设备的关键物理尺寸可以从尺寸谱下端的远低于 1 微米一直到几毫米不等。同样,MEMS 设备的类型可以从相对简单的没有移动元件的结构到具有多个移动元件的极其复杂的机电系统,这些元件受集成微电子控制。MEMS 的一个主要标准是至少有一些元件具有某种机械功能,无论这些元件是否可以移动 关键词 — 集成电路 (IC);MEMS;缩放。