XiaoMi-AI文件搜索系统
World File Search Systemoccupancy

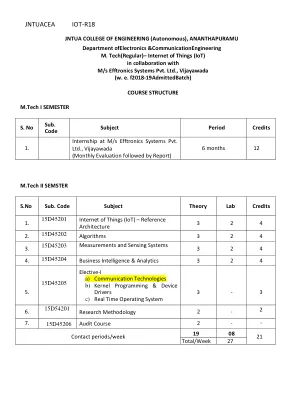
JNTUACEA IOT-R18
占用和运动探测器:超声波、微波运动、电容式占用、可见光和近红外光、远红外运动、PIR 运动、位置、位移和水平传感器:电位式、重力式、电容式、电感和磁式、光学、超声波、雷达位置、位移和水平传感器:电位式、重力式、电容式、电感和磁式、光学、超声波、雷达。速度和加速度传感器:电容式加速度计、压阻式加速度计、压电式加速度计、热加速度计、加热板加速度计、加热气体加速度计、陀螺仪、压电电缆 气体传感器:二氧化碳、一氧化碳、NOX、SOX、PM2.5、PM10、挥发性有机化合物 应用:制造业、机器人领域的案例研究


使用粗图>在看不见的环境中的机器人导航
摘要 - 公制占用图广泛用于机器人导航系统中。但是,当机器人被部署在看不见的环境中时,构建准确的度量图会耗时。可以使用粗图直接在以前看不见的环境中直接导航?在这项工作中,我们提出了粗大地图导航器(CMN),这是一个可以使用不同的粗图在看不见的环境中执行机器人导航的导航框架。为此,CMN解决了两个挑战:(1)新颖而现实的视觉观察; (2)粗图上的误差和错位。为了解决在看不见的环境中的新型视觉观测,CMN了解了一个深刻的感知模型,该模型将视觉输入从各个像素空间映射到本地占用网格空间。为了解决粗图上的误差和未对准,CMN使用预测的局部占用网格作为观测值扩展了贝叶斯过滤器,并直接在粗图上保持信念。使用最新信念,CMN提取了全球启发式向量,该向量指导计划者找到本地导航行动。经验结果表明,CMN在看不见的环境中实现了高导航的成功率,明显优于基准,并且对不同的粗图形具有鲁棒性。

lafd-ess-memo-and-checklist.pdf-洛杉矶
2023年5月2日至:FDS检查员和计划检查员,来自:Hani G. Malki,高级消防保护工程师消防开发服务部门主题:R3占用建筑的能源存储系统(ESS)2023年5月10日,为促进R3居住建筑的安装储能存储系统(ESS),Fire Development Services,Fire Development Services,为安装机器提供了修订指南。这些准则应取代所有先前发布的准则。按照以下所有指南安装ESS时,LADBS的电气应用不需要额外的消防部门审查。1。ESS电池单元用于外部安装