XiaoMi-AI文件搜索系统
World File Search Systempull
探索基于模型的系统工程 (MBSE) /模型...
基准测试 - 洛克希德·马丁 1 复杂模型生态系统 - 结合完全集成的数字系统模型,使程序能够拉动数字线程来更快、更准确地分析性能和变化影响。

圣安妮塔公园[ - 2025 年 1 月 1 日 - 第 1 场比赛
9Nov24 1 DMR 5 2 Lita Way (Ayuso, Armando) 124 L b 2 7 5 1 1/2 5 1 1/2 5 1 1/2 4 1/2 1 1/2 2.90 bp brk,3-4w, 反弹,上涨 9Nov24 1 DMR 2 5 Benster (Dettori, Lanfranco) 124 L 5 4 4 1/2 4 1 4 1/2 3 Head 2 1 1.30* 等待第二个 trn,led,naild 2Jun24 8 SA 6 3 Danzig Til Dawn (Gonzalez, Ricardo) 124 L b 3 1 3 1 1/2 2 Head 3 1 1 1/2 3 2 1/4 12.40 bp brk,2-3w,led upper 1Dec24 2 DMR 5 1 G'oro (Orantes, Welfin) 119 L b 1 2 2 1 1 1 1 1 1/2 2 1/2 4 2 8.90 pull,ins,resist,wknd 23Nov24 6 DMR 5 4 Copperhead Fever (Carmona, Serafin) 119 L b 4 3 1 Head 3 1/2 2 Head 5 1 5 Head 17.40 duel,stalk,bid, wknd 14Dec24 2 LRC 6 6 Cheering for Layla (Herrera, Diego) 124 L 6 5 6 1 1/2 7 6 2 1/2 6 15 6 42 1/2 46.10 2w,ins,came out str 24Aug24 7 DMR 6 7 冬雪 (Berrios, Hector) 124 L 7 6 7 6 头部 7 7 7 2.80 位慢速、出血、均衡环境



SIT8995
休眠延迟时间 t UVP 20 30 40 s 适配器最低电压 V OCHA 1 1.5 V CHSE 上的上拉电阻 R CHSE 800 1300 1800 kΩ VM 上的下拉电阻 R VM 250 500 700 kΩ 测试引脚的逻辑高电压 V TESTH 3.5 4 4.5 V 测试引脚的逻辑低电压 V TESTL 0 0.3 V SEL 的逻辑高电压 V SELH V DD -0.6 V DD -0.1 V SEL 的逻辑低电压 V SELL 0.6 V CHG 引脚上的输出电流 I CHG 4 5 6 μA DSG 引脚上的高压 1 输出 V DSG-1 V DD > 13V 11.5 12.5 13.5 V

颈背根的硬膜外电刺激恢复了瘫痪的猴子的自愿臂控制
图1。实验框架。(a)在左侧,行为实验平台的示意图。当动物执行机器人覆盖,掌握和拉动任务时,我们测量了施加到机器人接头,全LIMB运动学,肌电图(EMG)活性的3D力,来自手臂和手的八个肌肉,以及来自感觉运动区域的皮层内信号。实验方案的右,概念方案:(1)在控制计算机上运行的解码器确定了运动的尝试,(2)(2)将电脊髓刺激传递到适当的脊髓根。(3)刺激产生了我们在离线记录和分析的手臂和手动运动。(b)任务的示意图。猴子经过训练,可以抓住,掌握并拉出放置在机器人臂末端效应子上的目标对象。我们认为当目标空间阈值在拉动过程中越过时,我们认为运动完整。版权所有JemèreRuby。

EDA研究与技术协调EDA研究与技术协调
•陈述您对Captech的兴趣。cnges有望为Captech专家讨论和活动做出贡献。CNGE可能会以自下而上的方法(技术推动)提出R&T临时项目和研究,并响应自上而下的(能力拉)请求。
9N-AHH 飞机事故调查报告
当飞机飞过 10,100 英尺,到达 GHOREPANI 前 5 英里处时,机长表示云层仍然存在,因此建议副驾驶继续爬升至 12,000 英尺,并告知他们将冒险飞到 TATOPANI,然后再决定是继续飞行还是改道。02:14:50,当飞机飞过 GHOREPANI 区域 11,500 英尺时,EGPWS 地形警报和 02:14:52 PULL UP 警告出现,但飞机无法看到他们,02:15:01 表示飞机可以看到他们,警告于 02:14:53 停止。02:15:27,机长指示副驾驶保持航向 330 和略低于云层的飞行高度,之后开始小幅下降。这时机长询问副驾驶,他的一侧是否能看见,副驾驶回答说能看见一点。机长随后指示副驾驶下降至 10,000 英尺。当飞机于 02:15:55 开始下降,经过 11,000 英尺后,机舱内响起了超速警告,持续了 2 秒,此时速度达到 152 节。
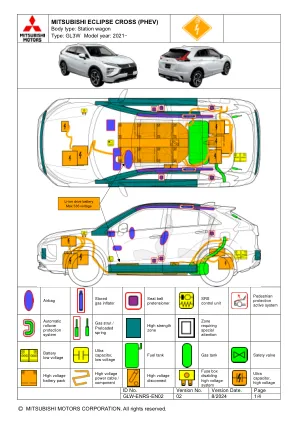
三菱Eclipse Cross(PHEV)
保险丝和3.-4。如何关闭高压(拉出服务塞))・如果车辆被淹没,驱动电池可能会产生易燃氢气。・如果车辆被淹没,水可能会进入驱动电池。8。拖曳 /运输 /存储< / div>