XiaoMi-AI文件搜索系统
World File Search Systemsimulation


设计与工程模拟解决方案
McNeal Schwendler 公司 (MSC) 成立于 1963 年,并获得了 NASA 的原始合同,将有限元分析 (FEA) 软件 NASTRAN(NASA 结构分析)商业化。MSC 率先开发了许多技术,现在业界依靠这些技术来分析和预测我们旗舰产品 MSC Nastran 中的应力和应变、振动和动力学、声学和热分析。在我们悠久的历史中,MSC 开发或收购了许多其他知名的 CAE 应用程序,包括 Patran、Adams、Marc、Dytran、CAEfatigue、SimManager、Easy5、Sinda、Actran、Digimat、Cradle CFD、VTD、FormingSuite、MSC Apex、Romax 和 Simufact。我们致力于持续开发新的 CAE 技术,将独立 CAE 工具中的学科和技术集成到统一的多学科求解器和用户环境中。我们的解决方案通过包含多物理场和多学科交互,使工程师能够提高虚拟原型的可靠性和准确性。MSC 还是 CAE 行业的领导者,通过针对材料和 CAE 数据的工程生命周期管理解决方案将模拟扩展到工程企业。


分布式水下战争模拟...
预测武器系统的性能很难用数学方程来估计,因为要考虑的变量很多。建模和仿真技术已经提出了可以评估武器系统开发和部署的最佳解决方案。模拟目的是设计模拟系统的决定性因素,但为每个目的开发一个模拟器成本高、不迅速、不灵活。分布式仿真系统通过将现有的模拟器与系统连接起来,允许以经济的输入资源进行大规模模拟,并且可以灵活、快速地重新设计系统以用于其他目的。本研究使用最初为军事模拟设计的 Delta3D 模拟游戏引擎在分布式系统中实现水下战争模拟,由于水下作战受环境情况影响最大,因此模拟系统交换环境数据。本研究采用 SEDRIS 处理环境数据,采用 HLA/RTI 处理分布式系统。
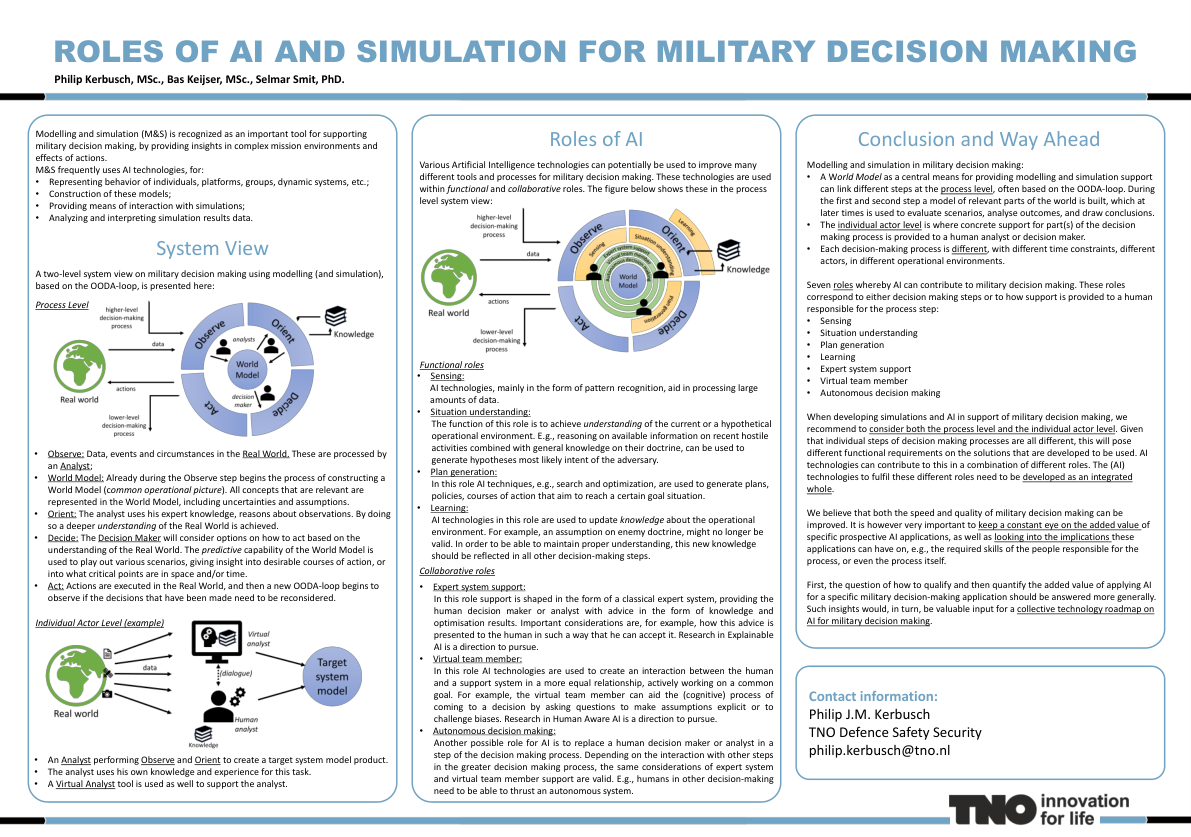
人工智能和模拟在军事中的作用...
• 观察:现实世界中的数据、事件和情况。这些由分析师处理; • 世界模型:在观察步骤中,已经开始构建世界模型(通用作战图)。所有相关概念都体现在世界模型中,包括不确定性和假设。• 定位:分析师利用其专业知识,对观察结果进行推理。通过这样做,可以更深入地了解现实世界。• 决定:决策者将根据对现实世界的理解考虑如何采取行动的选项。世界模型的预测能力用于演绎各种场景,深入了解理想的行动方案,或空间和/或时间中的关键点。• 行动:在现实世界中执行行动,然后新的 OODA 循环开始观察是否需要重新考虑已做出的决定。
医疗保健模拟词典 - AHRQ
得到以下组织的支持和投入:医疗保健模拟实践协会 (ASPiH) • 标准化病人教育者协会 (ASPE) • 澳大利亚医疗保健模拟协会 (ASSH) • 巴西健康模拟协会 (Abrassim) • 加拿大医疗保健模拟网络 (CNSH) • 智利临床模拟协会 • 荷兰医疗保健模拟协会 (DSSH) • 国际护理临床学习模拟协会 (INACSL) • 国际儿科模拟协会 (IPSS) • 意大利医疗保健模拟协会 • 日本医疗保健教学系统协会 (JSISH) • 韩国医疗保健模拟协会 (KoSSH) • 拉丁美洲临床模拟协会 (ALASIC) • 新西兰医疗保健模拟协会 (NZASH) • 泛亚医疗保健模拟协会 (PASSH) • 波兰医学模拟协会 (PSMS) • 葡萄牙模拟协会 (SPSim) • 俄罗斯医学模拟教育协会 (ROSOMED) • 欧洲医学应用模拟协会 (SESAM) •西班牙临床模拟与患者安全协会 (SESSEP)

黑客帝国系列 逼真模拟
投影仪输入和显示之间的传播延迟小于一帧,因此结果是逼真的实时模拟。这对于模拟学员和模拟图像之间的实时交互至关重要。Christie Matrix StIM TM 是真正的游戏规则改变者。它是第一个使用 LED 照明同时和独立控制可见光和近红外光谱的模拟系统。它是一个智能投影系统,可以逐帧实时平衡和优化颜色、亮度和黑色级别。它是第一个使用固态 LED 照明为模拟和训练而设计的系统 - 几乎无需维护,无需消耗品。Christie Matrix StIM 是一个可扩展的环境显示系统,它提供实现人眼极限分辨率的独特功能,同时模拟夜视镜,为夜视镜训练带来革命性的新功能。科视 Matrix StIM 独特的无灯照明系统提供前所未有的稳定性、可靠性和多年的连续运行。该系统由科视专业知识设计和制造,具有超长的使用寿命、质量和易维护性。科视基于固有稳定的长寿命平台构建,不使用偏振滤光片或随时间褪色,提供独特的无灯照明系统,具有前所未有的稳定性和可靠性。科视 Matrix StIM 无需耗材、发热量低、功耗低、完全符合 RoHS 规定并可连续运行多年,是一种几乎无需维护的环保模拟系统。
飞行模拟原理 - 免费
1 简介 1 1.1 历史回顾 1 1.1.1 飞行的最初 40 年 1905–1945 1 1.1.2 模拟计算,1945–1965 3 1.1.3 数字计算,1965–1985 5 1.1.4 微电子革命,1985 年至今 6 1.2 模拟案例 9 1.2.1 安全性 9 1.2.2 财务收益 10 1.2.3 培训转移 11 1.2.4 工程飞行模拟 13 1.3 模拟角色的变化 14 1.4 飞行模拟器的组织 16 1.4.1 运动方程 16 1.4.2 空气动力学模型 17 1.4.3 发动机模型 18 1.4.4 数据采集 18 1.4.5 起落架模型 19 1.4.6 天气模型 19 1.4.7 视觉系统 20 1.4.8 音响系统 21 1.4.9 运动系统 21 1.4.10 控制负载 22 1.4.11 仪表显示 23 1.4.12 导航系统 23 1.4.13 维护 24 1.5 实时模拟的概念 24 1.6 飞行员提示 27 1.6.1 视觉提示 28 1.6.2 运动提示 29 1.7 训练与模拟 30 1.8 模拟示例 32 1.8.1 商业飞行训练 32
模拟:心理健康N2660
扩展描述本专业实践课程包括一个方向课程和五次(模拟)专业实践课程,使学生能够与经历精神健康疾病的指定客户一起工作,从而发展对心理健康挑战的轨迹的理解。所有会议都将亲自举行。在每次会议期间,学生将以六人一组的成绩为面临心理健康挑战的客户提供护理。每天,小组中的两个学生将扮演护士的角色,采访客户,而其他人则会观察和记录。学习活动和客户信息将发布,以便所有学生都可以进行客户研究并准备以治疗方式进行互动。这种经历将为获得与心理健康关注的客户合作的知识和技能提供机会。学生将有机会进一步发展超越所有客户护理状况的沟通和评估技能。先决条件:压缩时间BSCN程序中的注册。额外的信息:模拟练习,通过/失败。面对面会议。课程重量:0.25

仿真建模实践与理论
本文提出了几种用于复杂在轨高自由度机器人的任务空间控制方法。这些方法包括冗余分辨率,并考虑了在轨机器人系统的非线性动态模型。在需要复杂人形机器人视觉伺服任务的几种在轨服务操作中探索了所提出的任务空间控制方法的适用性。一个统一的开源空间机器人模拟框架,称为 OnOrbitROS,用于评估所提出的控制系统并将其行为与最先进的现有系统进行比较。所采用的框架基于 ROS,包括并再现了最终空间机器人和机械手在轨服务场景中可能遇到的主要环境条件。介绍了开发的不同软件模块的架构及其在复杂空间机器人系统上的应用。使用所提出的 OnOrbitROS 框架实现了高效的实时实现。所提出的控制器用于执行人形机器人的引导。机器人动力学被集成到控制器的定义中,并在结果部分描述了结果和实际属性的分析。