XiaoMi-AI文件搜索系统
World File Search Systemtrap

陷阱深度分布决定余辉动力学
摘要:持续的发光材料在智能信号,抗矛盾和体内成像等各个领域都有应用。但是,缺乏对控制持续发光的确切机制的透彻理解,因此很难开发优化它的方法。在这里,我们提出了一个精确的模型,以描述Znga 2 O 4:Cr 3+的持续发光的各种过程,这是现场的主力材料。已经解决了一组速率方程,并且已经对电荷/放电和热发光测量进行了全局拟合。我们的结果建立了陷阱深度分布和余滴动力学之间的直接联系,并阐明了与Znga 2 O 4:Cr 3+纳米颗粒相关的主要挑战,确定了较低的陷阱概率和光学偏差,这是限制Znga 2 O 4:CR 3+的主要因素,并与大型Margin进行改进。我们的结果强调了准确建模对于未来余辉材料和设备设计的重要性。

质子辐照的超厚κ-...
1莫斯科,莫斯科,莱宁斯基PR。4,莫斯科119049,俄罗斯2 Perfect Crystals LLC,38K1 Toreza Avenue,Off。213, Saint Petersburg, 194223, Russia 3 Institute of Microelectronics Technology and High Purity Materials, Russian Academy of Sciences, 6 Academician Ossipyan str., Chernogolovka, Moscow Region 142432, Russia 4 Laboratory of Radiation Technologies, A. N. Frumkin Institute of Physical Chemistry and Electrochemistry Russian Academy of Sciences (IPCE RAS),莫斯科119071,俄罗斯5材料科学与工程系,韩国大学,Anamro 145,首尔02841,大韩民国6材料科学与工程系,佛罗里达大学佛罗里达大学佛罗里达大学佛罗里达大学,佛罗里达州盖恩斯维尔大学,佛罗里达州32611
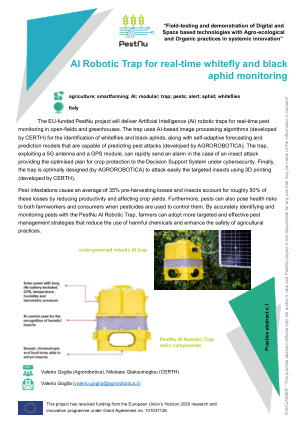
用于实时捕捉粉虱和黑蚜虫的人工智能机器人陷阱......
害虫侵扰平均造成 35% 的收获前损失,其中约 50% 的损失是由昆虫造成的,它们会降低生产力并影响农作物产量。此外,当使用农药控制害虫时,害虫还会对农场工人和消费者的健康构成风险。通过使用 PestNu AI 机器人诱捕器准确识别和监测害虫,农民可以采取更有针对性和更有效的害虫管理策略,减少有害化学品的使用并提高农业的安全性
新电子陷阱可能有助于量子计算机
克里斯·梦露(Chris Monroe)曾与基于离子的Qubits合作从事量子计算设备,他说,这项工作是“引人注目的”,但强调,在成为可行的技术之前,“未来还有很多剩余的挑战”。电子只有一个内部的“旋钮”(他们的旋转),而不会像离子状态一样,用激光束进行读写操作,无法通过激光束进行操纵。但是,哈夫纳说,为此而不是激光使用基于芯片的磁性操作实际上可以简化技术。Monroe补充说,将电子系统的元素与被困离子的元素结合在一起意味着电子量子位“希望可以采用两者中最好的”。

陷阱类型会影响粪甲虫分类学和功能...
ong,X。R.,David,H.,Gray,C.,Kemp,V.,Chung,A.Y。C.&Slade,E。M.(2021)。陷阱类型会影响婆罗洲热带森林中的粪甲虫分类和功能多样性。澳大利亚生态学。https://dx.doi.org/10.1111/aec.13124
TSV 集成表面电极离子阱可扩展...
1 新加坡科技研究局(A*STAR)微电子研究所,新加坡 117685 2 巴黎大学材料与现象实验室,法国巴黎 F-75013 3 南洋理工大学电气与电子工程学院,新加坡 639798 在本研究中,我们报告了一种铜填充硅通孔 (TSV) 集成离子阱的设计、制造和操作。TSV 被直接放置在电极下方,作为离子阱和玻璃中介层之间的垂直互连,随着电极数量的增加和复杂性的提高,可实现任意几何设计。TSV 的集成将离子阱的形状因子降低了 80% 以上,将寄生电容从 32±2 pF 最小化到 3±0.2 pF。尽管没有接地屏蔽层,但仍实现了低射频耗散。整个制造过程在 12 英寸晶圆上进行,并与成熟的 CMOS 后端工艺兼容。我们通过加载和激光冷却单个 88 Sr + 离子展示了该阱的基本功能。我们发现,加热速率(轴向频率为 300 kHz 时为 17 量子/毫秒)和寿命(约 30 分钟)与类似尺寸的阱相当。这项工作开创了 TSV 集成离子阱的发展,丰富了可扩展量子计算的工具箱。

在双曲 Paul 阱中捕获高电荷离子
1 美国国家标准与技术研究所 (NIST),美国马里兰州盖瑟斯堡 20899 2 特拉华大学,美国特拉华州纽瓦克 19716 3 克莱姆森大学,美国南卡罗来纳州克莱姆森 29634 4 马里兰大学,美国马里兰州帕克分校 20742 将离子限制在离子阱中有许多有趣的应用,包括精密光谱学、量子计量学以及强耦合单组分等离子体中的集体行为。在大多数情况下,单电荷离子或几次电离的物质是在离子阱内原位产生的。但是,某些应用需要专用的外部离子源。例如,将离子束注入线性射频 (RF) 阱中,形成以空间电荷为主的非中性等离子体,用于模拟强带电粒子束传播的实验,例如重离子聚变反应堆、散裂中子源和高能物理中的粒子束。强空间电荷效应使高电荷离子 (HCI) 的隔离更加复杂,该效应与电荷状态的平方成正比。在这项工作中,我们报告了在双曲线 RF 阱中捕获 ~500 Ne 10+ 离子。高电荷离子从 NIST 的电子束离子源/阱 (EBIS/T) 中提取,随后由 7 米长的光束线引导至离子阱装置;嵌套在静电光束线光学器件中的电荷质量分析仪用于选择要在 RF 阱中重新捕获的单个电荷状态 (Ne 10+)。我们讨论了实验优化,并将结果与计算机模拟进行了比较。实验捕获效率达到了 ~20%,在双曲线 RF 阱中捕获了 ~500 个 Ne 10+ 离子,与单元 Penning 阱中达到的捕获效率相当 [1]。RF 阱中可用的更大光学通道有利于改进光谱实验。由于 RF 驱动的微运动加热并且没有任何冷却机制,观察到的存储在 RF 阱中的 Ne 10+ 离子的存储寿命为 69 毫秒,短于单元 Penning 阱中相应的存储寿命。尽管如此,这对于各种光谱实验都很有用,包括许多电荷状态的原子状态寿命测量。探索了增加捕获离子数量和存储寿命的可能改进方法。参考文献
最终 FGGM OU1 前飞碟射击场 PRAP
2023 年 5 月 9 日 环境部 Robert Stroud 先生 NPL/BRAC/联邦设施处 美国环境保护署 701 Mapes Road Fort Meade, 马里兰州 20755 亲爱的 Stroud 先生: 随函附上乔治 G. 米德堡前陷阱和双向飞靶射击场、可操作单元 1(OU-1、FGGM-83)的最终拟议补救行动计划(报告)。本报告纳入了马里兰州环境部 (MDE) 于 2022 年 10 月 4 日和 2023 年 3 月 28 日以及美国环境保护署 (USEPA) 于 2022 年 10 月 28 日提出的意见。报告副本已提供给 Elisabeth Green(马里兰州环境部)、Fran Coulters(美国陆军环境司令部)、Shelly Morris(美国陆军工程兵团)、Jeff Leach(美国陆军公共卫生中心)、Craig Mah(乔治·米德堡参谋军法官)和乔治·米德堡修复咨询委员会。意见可在 30 天的公众意见征询期内提交(2023 年 5 月 18 日至 6 月 17 日)。公众意见必须在 2023 年 6 月 17 日之前寄出,并寄至美国陆军驻军公共事务办公室 Shaun Herron 先生,地址:4409 Llewellyn Avenue, Fort Meade, MD, 20755,或 Fort George G. Meade,收件人:AMIM-MEPE(Erin Geiger),地址:4216 Roberts Ave., Suite 5115, Fort Meade, Maryland 20755。如果您有任何疑问,请通过 erin.l.geiger2.civ@army.mil 与我联系。

光子整合光束输送在Rubidium 3D磁光陷阱中
冷原子对于精度原子应用至关重要,包括时间保存和传感。用于产生冷原子云的3D磁光陷阱(3D-mot)将受益于光子波导集成,以提高可靠性并降低尺寸,重量和成本。这些陷阱需要将多个大面积,准直的激光束传递到原子真空电池。迄今为止,使用集成波导方法的光束传递仍然难以捉摸。我们使用光纤耦合的光子积分电路报告了87 RB 3D-MOT的演示,以使所有必要的光束在冷却和捕获超过5 x 10 6原子的冷却和捕获量超过200μk的捕获体积,该捕获体积比等效原子数差异差异递增的数量级。氮化硅光子电路转化了纤维耦合的780 nm冷却,并通过波导将光线降低到三个正交的非差异2.5 mm x 3.5 mm x 3.5 mm自由空间冷却,并直接将光束直接接口到苏比德池。这种完整的平面,CMOS铸造 - 兼容的集成梁输送与其他组件(例如激光器和调节器),有希望的冷原子应用系统固定溶液。