XiaoMi-AI文件搜索系统
World File Search Systemunde
足球守门员定位的定量分析
名称定义实际GK位置守门员在射门时的实际位置。球线将球与射程中心连接起来。双配音器射击角度的分配器。保守的守门员保持接近目标。数据驱动的GKP模型GKP模型需要数据以实现。潜水半径是潜水阴影的半径。潜水阴影守门员可以潜水覆盖的圆形区域。事件数据点来自已使用的数据集。足球协会足球。几何GKP模型GKP模型,可以使用几何规则实现。GK守门员。 GKP模型守门员定位模型。 守门员到达守门员可以覆盖的线。 实现了已在代码中实现的GKP模型GKP模型。 刻有圆形圆锥圆锥的刻有圆圈的圆圈。 男士数据集过滤了男士欧洲欧洲能欧盟2020年数据集。 Messi测试一种评估方法,该方法分析了最佳的守门员。 建模GK位置GKP模型建议的GK位置。 非开枪射击,除守门员以外的球员在射门中。 开枪射击,射门锥中唯一的球员是守门员。 射击角度从射击位置到球门柱的线打开的角度。 射击三角形由射击位置和两个球门柱产生。 射门在射门时的位置。 Statsbomb 360数据集数据集,可捕获电视镜头上每个玩家的位置。 XG预期目标。GK守门员。GKP模型守门员定位模型。守门员到达守门员可以覆盖的线。实现了已在代码中实现的GKP模型GKP模型。刻有圆形圆锥圆锥的刻有圆圈的圆圈。男士数据集过滤了男士欧洲欧洲能欧盟2020年数据集。Messi测试一种评估方法,该方法分析了最佳的守门员。建模GK位置GKP模型建议的GK位置。非开枪射击,除守门员以外的球员在射门中。开枪射击,射门锥中唯一的球员是守门员。射击角度从射击位置到球门柱的线打开的角度。射击三角形由射击位置和两个球门柱产生。射门在射门时的位置。Statsbomb 360数据集数据集,可捕获电视镜头上每个玩家的位置。XG预期目标。未固定的区域区域,某些GKP模型无法建议GK位置。妇女数据集过滤了妇女欧洲欧洲橄榄球联盟2022年数据集。拍摄前的目标概率。XGOT在目标上的预期目标。与psxg相同。PSXG弹出后的预期目标。拍摄后的目标概率。

化学除冰剂评估测试方法手册
3.评价化学除冰剂的试验方法 ................................................. 1 7 3.1 物理化学特性...................................... 1 8 3.1 .1 采样 ................................................ 18 3 .1.2 除冰器分析 ................................................ 1 9 3.1 .3 水溶性 ................................................. 20 3.1 .4 冰点 ................................................ 23 3. 分区>1 .5 共晶温度 ................................ 25 3.1 .6 共晶成分 ................................ 2 6 3.1.7 溶解热 ................................... 2 8 3.1 .8 除冰剂溶液的粘度......................................... 2 9 3. div>1 .9 除冰解决方案的 p H ................................................. 30 3 .2 除冰性能 ................................................ 31 3.2。1 融冰测试(SHRP H -20 5 .1 和 H-20 5 .2)................ 31 3.2 .2 冰渗透测试(SHRP H-20 5) .3 和 H-20 5.4 ) .... 33 3.2.3 冰切下测试 (SHRP H- 2 0 5 .5 和 H-20 5.6 ) ................. 3 5 3.2.4 冰块测试 ................................. 38 3.3 与裸金属和涂层金属的兼容性 39 3.3。1 裸金属腐蚀 (SHRP H- 2 0 5 .7 ) ................ 39 3.3。2 盐雾对涂层金属的腐蚀 .................................. 40 3.4 与混凝土中金属的相容性 .................................. ...... 4 2 3.4 .1 混凝土中除冰化学钢筋的腐蚀作用 (SHRP H - 205.12) ................ 43 3.5 与混凝土和非金属的相容性 .... ................................. 44 3.5.1 快速评价除冰剂对混凝土影响的方法(SHRP H - 205.8) .................................. 44 3.5.2 除冰剂对混凝土的结垢影响 (SHRP H - 205.9) .. ...................................................... 47 3.5.3 耐磨性 ...... ...................................... 48 3.5.4 混凝土机械强度保留 .................................. .. ... 49 3.5.5 除冰剂对非金属的影响....................................... 51
停止和商店药房疫苗知情同意书4。
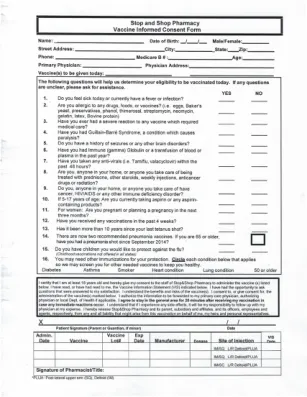
我证明我今年18岁,并在此同意我同意ST OP&Shop Pharm a Cy的工作人员,以管理疫苗。imav e read to to tatement(vi s)i ndic i ndic i ndic i ndic i ndic i n d e ndic a v e to to t od me。我已经回答了我的机会。我了解疫苗的益处和ris k s。我同意或同意同意,在v acc ine(s)m a rked bel o w的离子中的ad m。我的作者将向我的Prima r y Care医师,授权医师或地方部门转发。如果应用电缆,健康。在接受疫苗接种后,我同意在一般区域停留20分钟,以防发生任何情况。我说明,如果我有任何副作用,我将是我的责任,我可以跟进我的医生。i特区与Se Stop&Shop Pharmacy及其父母,子公司和分支机构一起使用,并提供了ees ees ees and ees and ees and aqents r espectiv e lv,f r om any and and al liabil i ty ty可能是由我和个人代表的,我可能会代表我和个人代表。x / / pa t ien t签名(父母或gua r d i,如果很少)< / div> < / div>
产品功能摘要
产品特性摘要1。Rispolept的药物1 mg/ml口服溶液的商业名称2。定性和定量组成1 ml口服溶液含有利培酮1 mg。具有已知作用1 mL口服溶液的赋形剂含有2 mg苯甲酸(E 210)。有关所有赋形剂列表的6.1。3。药物形式的口服溶液。清晰无色的解决方案。4。临床数据4.1精神分裂症的治疗中有相反的治疗适应症。Rispolept在治疗与双相情感障碍有关的中度至严重的疯子发作(访问)中。rispolept表示,他们对非药理方法没有反应,并且存在暴力和自我攻击的风险。rispolept表示,其智力功能低于平均水平或根据DSM-IV标准诊断出智力低下,在该标准中诊断为攻击性或破坏性治疗的严重性。药理学治疗应该是更全面的治疗计划的组成部分,包括社会心理和教育干预措施。建议利培酮由儿童神经病学和儿童精神病学专家和青少年专家开处方,或者对儿童和青少年行为障碍的治疗非常熟悉。
引文 Kurushima S、Koga T、Umeda M、Iwamoto N、Miyashita R、Tokito T、Okuno D、Yura H、Ishimoto H、Kido T、Sakamoto N、Ueki Y、Mukae H 和 Kawakami
类风湿关节炎 (RA) 是一种以慢性关节炎为特征的炎症性自身免疫性疾病,常伴有关节外影响,如间质性肺病 (ILD)。RA 相关 ILD (RA-ILD) 是一种严重的并发症,可影响预后 ( 1 , 2 )。尽管生物制剂抗风湿药 (bDMARDs) 和 Janus 激酶抑制剂 (JAKi) 的出现扩大了 RA 的治疗选择,但 RA-ILD 的最佳治疗方法仍未确定 ( 3 , 4 )。值得注意的是,一些研究强调,在患有 ILD 的 RA 患者中使用抗风湿药物时,需要注意呼吸道感染和药物性肺损伤的风险 ( 5 , 6 )。目前,阿巴西普(一种细胞毒性 T 淋巴细胞相关蛋白 4 (CTLA4) 胞外结构域与人 IgG1 Fc 区融合蛋白)被认为是治疗伴有 ILD 的 RA 患者最合理的选择 ( 7 );然而,最近的报告表明,JAKi 对 RA-ILD 疾病行为的影响方面的有效性和安全性可能与阿巴西普相当 ( 8 , 9 )。与 RA-ILD 进展或急性加重有关的因素包括寻常型间质性肺炎 (UIP) 模式、用力肺活量下降、吸烟和抗环瓜氨酸蛋白抗体 (ACPA) 高滴度 ( 10 , 11 )。此外,与新发 RA-ILD 相关的危险因素包括高龄、男性、吸烟、类风湿因子和 ACPA 高滴度以及关节炎活动性控制不佳 (12-14)。上皮-间质转化 (EMT) 是一个关键的生理过程,在此过程中上皮细胞失去极性并转变为间质表型。上皮细胞标志物 E-钙粘蛋白的下调和间质标志物 N-钙粘蛋白的上调(也称为钙粘蛋白转换)是 EMT 的特征 (15,16)。尽管 EMT 具有重要的生理意义,但它也与各种病理状态有关,尤其是在细胞损伤和慢性炎症后 (17)。事实上,EMT 被认为是 RA-ILD 发病机制中的关键过程之一,类似于导致特发性肺纤维化的事件(18)。人类肺泡 II 型细胞的体外研究表明,转化生长因子-b 和白细胞介素 (IL)-6 等因子治疗可诱导 EMT,据报道,阻断 JAK/STAT 信号通路可抑制 EMT(19)。然而,治疗 RA 的主要药物甲氨蝶呤 (MTX)(20)对 EMT 的影响仍未得到充分探索。本研究的目的是比较用 JAKi 或 bDMARDs 治疗的 RA-ILD 患者胸部计算机断层扫描 (CT) 图像的时间变化,并确定与影像学上 RA-ILD 恶化相关的因素。此外,我们通过体外研究 JAKi 和 MTX 治疗对 RA-ILD 患者纤维化状态的可能作用机制,研究了它们对 IL-6 诱导的肺泡上皮细胞 EMT 的影响。我们的研究结果揭示了 JAKi 和 MTX 治疗抑制 RA-ILD 进展的潜力。

人类大脑的每日温度节律可预测脑损伤后的生存率
患者接受干预以达到“正常”脑温;这一参数对于人类而言仍未定义。神经元功能对温度的高度敏感性意味着大脑应该是等温的,但对患者和非人类灵长类动物的观察表明大脑存在显著的时空变化。我们旨在通过确定健康成人的脑温变化程度来确定患者脑温的临床意义。我们回顾性地筛选了所有参加欧洲神经创伤协作脑损伤疗效研究 (CENTER-TBI) 高分辨率重症监护病房子研究的患者的数据。仅纳入直接测量脑温且未进行有针对性的温度管理的患者。为了解释患者分析结果,我们前瞻性地招募了 40 名健康成人(20 名男性、20 名女性,20-40 岁)使用磁共振波谱法进行脑温测量。参与者在一天中的早上、下午和深夜接受扫描。在患者 ( n = 114 ) 中,脑温范围为 32.6 至 42.3°C,平均脑温 (38.5 ± 0.8°C) 超过体温 (37.5 ± 0.5°C,P < 0.0001)。在 100 名符合脑温节律分析条件的患者中,25 名表现出每日节律,老年患者的脑温范围降低 ( P = 0.018)。在健康参与者中,脑温范围为 36.1 至 40.9°C;平均脑温 (38.5 ± 0.4°C) 超过口腔温度 (36.0 ± 0.5°C),黄体期女性比卵泡期女性和男性高 0.36°C(分别为 P = 0.0006 和 P < 0.0001)。温度随着年龄的增长而增加,最明显的是大脑深层区域(20 年内增加 0.6°C,P = 0.0002),空间变化为 2.41 ± 0.46°C,丘脑温度最高。大脑温度随一天中的时间而变化,尤其在深层区域(0.86°C,P = 0.0001),夜间温度最低。根据健康数据,我们构建了 HEATWAVE——人类大脑温度的 4D 地图。在测试 HEATWAVE 对患者的临床相关性时,我们发现缺乏每日大脑温度节律会使重症监护中的死亡几率增加 21 倍(P = 0.016),而绝对温度最大值或最小值并不能预测结果。较高的平均大脑温度与生存率相关(P = 0.035),但是,衰老 10 岁会使死亡几率增加 11 倍(P = 0.0002)。人类大脑的温度比以前认为的要高,而且变化幅度更大——受年龄、性别、月经周期、大脑区域和一天中的时间影响。这对温度监测和管理具有重大意义,每日大脑温度节律性正在成为脑损伤后生存的最强单一预测因素之一。我们得出结论,每日节律性大脑温度变化——而不是绝对大脑温度——是人类大脑生理学与病理生理学区别开来的一种方式。

机器人技术知觉计划:挑战和机遇
恢复,并在capab iliti es on Capab iliti es [1]上可以增强I gn ifi,并开放,开放,开放了i ng poss i ng poss i n o n i n o n ob ob ob ob ob obo ti cap li cap li cap li。howe v e r,des i gn i ng th hods t e ffi c i en tly I n t e eg eg r a t e t e p e p e pe r cep ti on ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti ti n o c ti ti ti ti a con ti oc ti cob tiv es tiv e e ema i e e ema i ns a n s a n s a n s a lon -Trivi a l cha ll Cha ll Enge enge。t h i s a r equire emen t f o r man y p r o o o o o o o o o o o o o o o ti capp app li ca ti op li co li a co ll abo abo a a tiv e r o o o o o o o o o o o o o o o o o o o o o o obo t s [2],ag ag ag e quad r e quad r o t o quad r o t o t o r flyri ng [3]和自动机器人[4]。Wh il e e xi s ti ng mob il e r obo ti cs t asks such as i nspec ti on p l ann i ng [ 5 ] and su rv e ill ance [ 6 ] o ft en r equ ir e ach i e vi ng vi s i b ility o f l andma r ks , t he r e i s a gap i n unde r s t and i ng how t o i n t eg r添加fr eedom(d o f)时,请加上Iti ina l deg ees fre e eS fi e ng fi e l d d -o f -vi ew cons tr a i n t s。recen th i e r a r a r ch i ca l tr tr a tr a t hods f o r man i pu l a t o l a t o a t o r s us i n nu ll space p r o j ec ti ins and i mpedance con ti con ti con ti con ti con ti con con ti con con ti [7]I n t h i s pape r, we a r gue i n f a v o r o f new me t hods capab l e o f gene r a ti ng r obo t mo ti on f o r na vi ga ti on o r man i pu l a ti on wh il e e ff ec tiv e ly accomp li sh i ng pe r cep ti on goa l s .E xi s ti ng me t hods f ocus on how t o p l an r obo t mo ti on i n t he p r esence o f unseen [ 8 ] o r d y nam i c [ 9 ] obs t ac l es , o r how t o i mp r o v e r obo t l oca li za ti on [ 10 , 11 ].,具有同时的感知和行动目标。Fu rt he r mo r e , me t hods t ha t cons i de r po i n t o f i n t e r es t cons tr a i n t s s i mp ly r e ly on keep i ng t he cen tr o i d o f t he tr acked f ea t u r es a t t he cen t e r o f t he i mage p l ane [ 3 , 1 2 ].f i n na lly,hod ti ti ti ti ti ti ti ti ti ti t hod a te a r e des i d o n of to n o n of and and and and to a ri a l v eh i c l es [3,9 - 1 2]这是关于cons tr a i n t s s的。We pos it t ha t app r oaches t ha t ho li s ti ca lly cons i de r pe r cep ti on and mo ti on goa l s a r e needed t o ach i e v e e ff ec tiv e mu lti-t ask capab l e r obo t s — i. e。我们会促使人们助长了人们的征服。一个人t。 T o

机器人感知规划:挑战与机遇
机器学习和计算机视觉领域的最新进展显着增强了机器人的感知能力[1],为新的机器人应用开辟了可能性。然而,设计有效整合感知和行动目标的方法仍然是一个不小的挑战。这对协作机器人 [2]、敏捷四旋翼飞行 [3] 和自主安全机器人 [4] 等有前景的机器人应用提出了要求。虽然现有的移动机器人任务(如检查规划[5]和监视[6])通常需要实现地标的可见性,但在理解和如何在解决视野约束时整合额外的自由度(DOF)方面仍然存在差距。近期,使用零空间投影和阻抗控制的机械手分层跟踪方法 [ 7 ] 虽然相关,但尚未完全解决这一挑战。在本文中,我们主张采用新方法,生成用于导航或操纵的机器人运动,同时有效地实现感知目标。现有的方法主要集中于如何在存在看不见的[8]或动态[9]障碍物的情况下规划机器人运动,或者如何改进漫游车的机器人定位[10,11]。此外,考虑兴趣点约束的方法仅仅依赖于将被跟踪特征的质心保持在图像平面的中心[3,12]。最后,大多数现有的方法都是为无人机设计的[3,9-12],不能轻易推广到高自由度机器人,如移动机械手或具有运动约束的机器人。我们认为,需要全面考虑感知和运动目标的方法,才能实现有效的多任务机器人——即同时具有感知和行动目标的机器人。我们通过进行实验来支持我们的机器人,这些机器人必须完成基本任务,例如操纵或导航,同时保持对物体的连续监控。等他环境。到

玩具车垫 3D 全印花运动服
“美国城市、城镇、社区、州、县、大都市区、邮政编码、区号和学校的本地指南。” 76 次观看45 次观看49 次观看39 次观看41 次观看36 次观看36 次观看37 次观看33 次观看37 次观看35 次观看35 次观看36 次观看40 次观看34 次观看45 次观看36 次观看39 次观看27 次观看35 次观看25 次观看37 次观看35 次观看32 次观看26 次观看29 次观看41 次观看24 次观看43 次观看25 次观看35 次观看30 次观看39 次观看27 次观看27 次观看30 次观看27 次观看22 次观看31 次观看30 次观看24 次观看26 次观看26 次观看31 次观看31 次观看29 次观看22 次观看40 次观看26 次观看24 次观看30 次观看40 次观看25 次观看26 次观看25 次观看19 次观看93 次观看80 次观看69 次观看84 次观看61 次观看63 次观看70 次观看83 次观看91 次观看105 次观看52 次观看57 次观看89 次观看67 次观看74 次观看88 次观看71 次观看55 次观看82 次观看52 次观看80 次观看73 次观看49 次观看69 次观看51浏览次数56 浏览次数56 浏览次数55 浏览次数60 浏览次数41 浏览次数65 浏览次数50 浏览次数65 浏览次数50 浏览次数41 浏览次数43 浏览次数52 浏览次数45 浏览次数55 浏览次数49 浏览次数43 浏览次数52 浏览次数62 浏览次数49 浏览次数44 浏览次数 从 0 天 0 小时 00 分钟 00 秒 分享此优惠 送货需要至少 7 个工作日才能发货 购买的物品可以从我们的办公室领取或送货 物品必须在 2021 年 6 月 27 日之前领取/收到 未在 2021 年 6 月 27 日之前领取/收到的物品将被没收,不予退款 您的产品可立即领取 - 详情请参阅下文 无现金价值/无现金返还/不退款 立即检查产品;自收到产品之日起 7 天内有缺陷退货,前提是退回的物品未使用且