XiaoMi-AI文件搜索系统
World File Search System不准确性

利用AI和CCTV进行有效跟踪
车辆盗窃是全球不断上升的犯罪。GPS跟踪器并不是所有车辆的标准配合,缺乏互联网连接使追踪对官员充满挑战的被盗车辆。GPS信号可能会受到不同环境因素(例如地形或致密叶子)的影响,这可能会导致位置跟踪的不准确性。为了解决这些问题,建议的解决方案利用CCTV系统遵循被盗汽车的路线并加快搜索工作的速度。建议的概念提出了一种成功的方法,用于利用先进的计算机视觉和深度学习方法来通过CCTV视频来检测和监视被盗的汽车。从各种来源审查CCTV录像可以加快反应并改善检索,同时保留数据隐私。预测汽车颜色和汽车模型的准确性在结果中超过90%。汽车路线预测为RMSE得分为0.000171。建议的模型提出了一种跟踪解决方案,该解决方案利用当前的CCTV基础架构,而无需在车辆中安装任何额外的硬件。
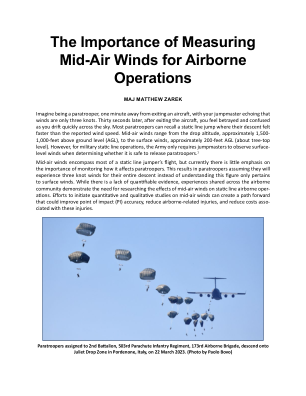
测量空中风对空中作业的重要性
不准确性和伤害继续在进行空降行动的风险评估中发挥作用,这增加了在静态线操作期间监测空中风的理由。尽管空降界普遍认为高空风速越快,伞兵在着陆时水平漂移越快,但有根据的数据极其有限。2022 年和 2023 年的两起轶事案例凸显了潜在影响,但需要进一步研究才能得出明确结论。在两次空降行动中,空中风速都超过了 25 节,但地面风仍在可容忍范围内。在这两种情况下,六名经验丰富的跳伞者都带着 MC-6 降落伞跳出,这是一种可操纵的伞盖,具有 10 节向前漂移的能力。即使跳伞者采取了适当的降落伞着陆 (PLF) 姿势,他们都迅速向后漂移并以极大的力量着陆。大多数人需要某种形式的医疗救治。如果这些伞兵使用 T-11 降落伞,潜在的伤害可能会更加严重。

在线轨迹重新启动器,用于动态抓住不规则对象
摘要 - 本文提出了一种用于抓住不规则对象的新轨迹重新启动器。与常规的掌握任务不同,该任务简单地假定对象的几何形状,我们旨在实现不规则对象的“动态掌握”,这需要在握把过程中持续调整。为了有效处理不规则的对象,我们提出了一个构成两个阶段的轨迹优化框架。首先,在指定的时间限制为10 s的指定时间限制中,为从机器人的初始配置中进行无缝运动计算初始离线轨迹,以掌握对象并将其传递到预定义的目标位置。其次,实现了快速的在线轨迹优化,以在100毫秒内实时更新机器人轨迹。这有助于减轻视力系统中的估计错误。为了解释模型的不准确性,干扰和其他非模块化效果,实施了机器人和抓手的轨迹跟踪控制器,以从提出的框架中阐明最佳轨迹。密集的实验结果有效地证明了我们在模拟和现实世界中的轨迹计划框架的性能。

Bin Liu, Xiujie Zhao, Yiqi Liu, Phuc Do Van. 多维退化和不完善检查系统的维护优化。Inter
在本文中,我们为经历多个相关退化过程的系统开发了一个维护模型,其中使用多元随机过程来建模退化过程,并使用协方差矩阵来描述过程之间的相互作用。当任何退化特征达到预先指定的阈值时,系统即被认为发生故障。由于基于退化的故障具有休眠性,因此需要进行检查以检测隐藏的故障。检查后将更换发生故障的系统。我们假设检查不完善,因此只有特定的概率才能检测到故障。基于退化过程,以系统可靠性评估为基础,然后建立维护模型以减少经济损失。我们提供了成本最优检查间隔的理论边界,然后将其集成到优化算法中以减轻计算负担。最后,以疲劳裂纹扩展过程为例,说明了所开发的维护策略的有效性和稳健性。研究了退化依赖性和检查精度的影响,以获得更多管理见解。数值结果表明,检查不准确性对运营成本有重大影响,建议应付出更多努力来提高检查精度。

飞机核电站撞击模拟方法 - Dynalook
LS-DYNA 包含 12 多种材料模型,可用于描述混凝土结构行为 [1]。本研究使用 *MAT_CSCM(_CONCRETE)/*(MAT_159) 混凝土模型 [2]–[4]。该模型基于三个不变屈服面,可以分别跟踪拉伸和压缩损伤,根据应变率效应调整混凝土强度和断裂能。由于“易输入”程序,所有输入参数均可按照 CEB-FIP 模型代码 [5] 重新生成。该程序提供基于用户输入参数的初始化例程,这些参数为正常混凝土强度 ∈ [20; 58] MPa,重点是中间范围 ∈ [28; 48] MPa[2]。单元素试验 对一个有限元的单轴无侧限拉伸和压缩的几项试验表明,声明的初始化程序给出的材料参数存在很大的不准确性。所得结果也得到了许多论文 [6]、[7] 的证实。因此,基于模型初始数据 [2] 和第三方研究 [6] 开发了新的外部初始化程序。该程序根据用户输入的抗压强度和骨料尺寸数据生成所有输入参数。单元素试验的结果如图所示。1 和 2。
充分利用人工智能和大型语言模型来支持健康科学图书馆的收集开发
该项目调查了生成AI模型在协助健康科学图书馆员进行收集开发方面的潜力。Chapman大学的Harry和Diane Rinker Health Science Campus的研究人员评估了四种生成AI模型,即Chatgpt 4.0,Google Gemini,Perpelxity和Microsoft Copilot-从2024年3月开始六个月。使用了两个提示:一个是在特定的健康科学领域生成最新的电子书标题,另一个用于确定现有收藏中的主题差距。第一个提示揭示了跨模型的不一致之处,副驾驶和困惑提供了来源,也提供了不准确性。第二提示得出了更有用的结果,所有模型均提供有用的分析和准确的国会电话号码库。这些发现表明,由于不准确和幻觉,大型语言模型(LLM)尚未作为收集开发的主要工具可靠。但是,它们可以用作分析主题覆盖范围并确定健康科学收集差距的补充工具。
马来西亚的网络安全景观2024
免责声明本出版物包含根据Pikom进行的一项调查以及Sunway大学和马来西亚诺丁汉大学的定性分析的发现,他们对私营部门,政府机构和民间社会的代表进行了各自的访谈。本出版物中提供的所有信息均严格以“原样”和“可用”为基础提供,仅提供信息和参考。在此谨慎的情况下,请告知该释放不会提出以解决任何特定个人或实体的情况。因此,包括其赞助商,合作伙伴和同事(无论命名或未命名)在内的Pikom不保证数据和发现的准确性或充分性。此外,所有有关方面都明确违反了与本出版物内容有关的错误或遗漏或不准确性的责任。因此,本出版物中介绍的数据和发现的使用仅符合用户的风险。pikom在任何情况下均不应对损害,损失或费用责任,包括无限制,直接,偶然,特殊或结果损害或与本系列发表的数据和 /或有关的损害或经济损失或经济损失。但是,可以从本出版物的生产者那里寻求专业建议。

极化指导的无面膜阴影去除
阴影是一种脱离图像质量并降低下游视觉算法的性能的现象。尽管当前的图像删除方法已经取得了有希望的进度,但其中许多需要外部获得的阴影掩码作为输入数据的必要部分,这不仅引入了额外的工作量,而且还会导致由于面具的不准确性而导致阴影边界附近退化的性能。其中一些不需要阴影面具,但是,他们需要多种恢复亮度和颜色信息的恢复,以及保留阴影区域内的质地和结构信息而没有外部线索,这会带来高度不良的性感,并使易于制品的结果。在本文中,我们提出了第一个pol arization引导的图像sha dow re moval解决方案的pol-noss,以较少的伪影以无面膜的方式去除阴影。具体来说,它由一条两阶段的管道组成,可以重新设置不适当的状态,并为管道量身定制的神经网络,以抑制工件。实验结果表明,我们的pol-share在合成图像和现实世界图像上都达到了最先进的性能。

流体镜头的端到端优化
定制成像级镜头的原型制作和少量生产是困难且昂贵的,尤其是对于更复杂的非球面形状而言。流体形状最近被提议作为一种潜在的解决方案:它利用液体之间界面的原子水平平滑度,其中界面的形状可以通过边界条件,浮力控制和其他物理参数仔细控制。如果一种液体是树脂,则可以通过固化来“冷冻”其形状,从而产生固体光学元素。虽然流体形状是一个有前途的途径,但该方法产生的形状空间目前仅以偏微分方程的形式描述,这些方程与现有镜头设计过程不相容。更重要的是,我们证明现有的PDE不准确,不准确。在这项工作中,我们开发了由流体成型技术产生的形状太空镜片的新表述。它克服了以前模型的不准确性,通过可区分的实现,可以基于可区分的射线跟踪将最新的端到端光学设计管道集成到最新的端到端光学设计管道中。我们通过模拟以及初始物理原型广泛评估模型和设计管道。
充分利用人工智能和大型语言模型来支持健康科学图书馆的收集开发
该项目调查了生成AI模型在协助健康科学图书馆员进行收集开发方面的潜力。Chapman大学的Harry和Diane Rinker Health Science Campus的研究人员评估了四种生成AI模型,即Chatgpt 4.0,Google Gemini,Perpelxity和Microsoft Copilot-从2024年3月开始六个月。使用了两个提示:一个是在特定的健康科学领域生成最新的电子书标题,另一个用于确定现有收藏中的主题差距。第一个提示揭示了跨模型的不一致之处,副驾驶和困惑提供了来源,也提供了不准确性。第二提示得出了更有用的结果,所有模型均提供有用的分析和准确的国会电话号码库。这些发现表明,由于不准确和幻觉,大型语言模型(LLM)尚未作为收集开发的主要工具可靠。但是,它们可以用作分析主题覆盖范围并确定健康科学收集差距的补充工具。