XiaoMi-AI文件搜索系统
World File Search System中继
STS-70 | spacepresskit
STS-70 徽章 STS070-S-001——由机组人员设计的 STS-70 徽章描绘了在浩瀚的漆黑太空中绕地球运行的发现号航天飞机。部署 NASA 跟踪和数据中继卫星 (TDRS) 的主要任务由三颗金星表示。它们代表由通过跟踪和数据中继卫星系统 (TDRSS) 向地球传输数据的航天器组成的三合一。风格化的红、白、蓝丝带代表了将太空探索与全人类进步联系起来的美国目标。五名宇航员机组人员的姓氏分布在徽章的周围。NASA 航天飞机飞行徽章设计仅供宇航员使用,并供 NASA 局长授权的其他官方使用。各新闻媒体仅批准以插图形式向公众开放。如果本政策有任何变化(我们预计不会发生),我们将公开宣布。照片来源:NASA 或美国国家航空航天局。
冬季 COVID-19 疫苗剂量 – 情况说明书
如需以其他格式获取此文件,请拨打 1300 651 160,如有必要可使用国家中继服务 13 36 77,或发送电子邮件至 COVIDvaccination@dhhs.vic.gov.au。经维多利亚州政府授权和发布,地址:1 Treasury Place, Melbourne。©澳大利亚维多利亚州卫生部,2022 年 3 月。


移动式潜艇目标强度测量
提出了一种利用潜艇导航系统和声纳浮标测量潜艇在航行过程中目标强度的方法。直接序列扩频信号通过甚高频传输到遥测中继声纳浮标,后者以声学方式重新传输信号。标准声纳浮标接收信号并将其中继到数据记录器。使用高稳定性时钟同步发射器和接收器,可以通过直接和反射声路径在声纳浮标发射器和接收器之间进行精确的飞行时间测量。需要知道这三个物体的位置,以区分目标和表面反射,并测量源、目标和接收器之间的双基地角度。目标的位置由潜艇惯性导航系统估计,其他物体的位置则以潜艇位置为参考进行估计,并在潜艇移动时随时间构建基线。通过比较从直接路径和反射路径接收的信号与参考信号的相关性来计算目标强度。该技术可以在负 SNR 环境中进行目标强度测量。描述了该方法的实施,并给出了操作场景模拟的结果。
OHA 7549a 鉴别诊断和双相情感障碍
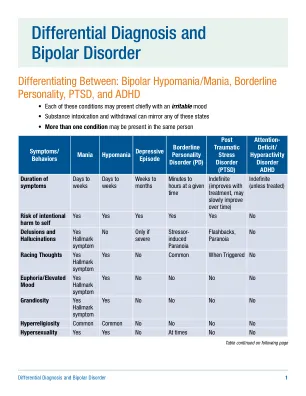
您可以获取其他语言、大号字体、盲文或您喜欢的格式的本文件。联系 Amanda Parish,电话:503-383-8142,或发送电子邮件至 amanda.b.parish@dhsoha.state.or.us。我们接受所有中继电话,或者您可以拨打 711。健康政策与分析 交付系统创新办公室 500 Summer St NE Salem, OR 97301 OHA 7549a (03/2020)
公共卫生诚信委员会 2023 年 3 月 13 日会议...
根据《美国残疾人法案》的规定,任何需要特殊安排才能参加本次研讨会/会议的人都应在研讨会/会议开始前至少 4 天通知该机构,联系方式为:Jon Conley,电子邮箱:Jon.Conley@flhealth.gov。如果您有听力或言语障碍,请使用佛罗里达中继服务联系该机构,电话:1(800)955-8771 (TDD) 或 1(800)955-8770 (语音)。
连接越南:电子墙 - SOBCHAK SECURITY
附件 空中投放地震入侵探测器 (ADSID) 159 手持投放地震入侵探测器 (HANDSID) 160 MINISID 和 MICROSID 161 战斗机空中投放地震入侵探测器 (FADSID) 162 发动机检测传感器 (EDIT) 162 老挝步道网络 163 数据中继和攻击 164 老挝 7 号公路上的传感器串 165 移动目标计算机显示屏的表示 166 EC-121R 中继平台 167 中继轨道 168 集束炸弹单元 (CBU) 操作 169 Dragontooth/APERS 子弹药 170 广域杀伤人员地雷 (WAAPM) 子弹药 171 BLU-66 杀伤人员小炸弹 171 BLU-53 化学炸弹 171 BLU-31 地雷 172 未来无人战场 173照片 175 EC-121R 在泰国上空飞行 176 OP-2E 停在泰国 NKP 的飞行坡道上 177 B-57G 在飞行中 178 QU-22B 在飞行坡道上 179 ADSID 传感器准备装载到 25 战术战斗机联队的 180 号飞机上,位于泰国乌汶 SUU-42 投送舱安装在 181 号 F-4D 飞机上 SUU-42 投送舱安装在 182 号 25 战术战斗机联队的 183 号飞机上 CBU-42 集束炸弹装置安装在 183 号 25 战术战斗机联队的 183 号飞机上 CBU-42 集束炸弹装置安装在 184 号 F-4D 飞机上,位于泰国乌汶 停在 184 号坡道上的 25 战术战斗机联队的 185 号坡道上的 25 战术战斗机联队的 185 号飞机上

科罗拉多大学 航空航天工程科学系 ASEN 4018
洛克希德·马丁公司给这个团队下达了以下指令:“ExPO(行星海洋探索)系统(客户)计划在未来探索木卫二的海底海洋。”这是一项 A 阶段研究,旨在评估自主海底任务的可行性。这项研究将模拟团队预计将面临的一些关键电信挑战。这次探索任务将面临光时通信挑战、协调深空资产挑战和水下挑战。目前没有现有的导航辅助设备。唯一可用的资源将是轨道中继卫星,允许在车辆浮出水面时在规定的时间进行定期数据传输。除了在地面站和车辆之间中继上行/下行数据外,该轨道器没有其他功能。“提供早期能力的演示,为未来的木卫二探索任务做准备。本次演示将以地球为基础,并将成为外星飞行器操作概念的技术演示。构建一个探索 AUV(自主水下航行器),以在静止的水体中搜索、识别和报告多个感兴趣的物体。报告水体中已识别物体的相对位置和每个物体的下行图像数据。轨道中继卫星将允许有限的数据传输。本次演示仅允许 3 个上行/下行窗口,每个窗口持续时间为 5 分钟。这些窗口将在任务执行开始时、任务执行 20 分钟后和任务执行 40 分钟后出现。您将无法根据当前下行窗口的数据上传数据。从设置、执行到拆卸的任务操作必须在 90 分钟内完成,执行时间为 60 分钟。”解决这个设计问题将增强洛克希德马丁公司对自主水下航行器的知识体系,特别是此类航行器在复杂水下环境中航行的能力。该团队需要以 5000 美元的预算设计和创新这个问题。

VORTEX® S 系列收发器 - L3Harris
L3Harris VORTEX S 收发器提供实时全动态视频 (FMV) 和其他网络数据,用于态势感知、目标定位、战斗损伤评估、监视、中继、车队监视操作和其他需要目视目标的情况。凭借无与伦比的波形设置,VORTEX S 可与空中几乎所有大型机身、无人机和瞄准吊舱以及地面上的所有 ROVER® 和其他远程视频终端和战术操作中心互操作。