XiaoMi-AI文件搜索系统
World File Search System交轴
代谢交流在天然微生物群落中无处不在
微生物群落推动全球生物地球化学周期并塑造包括人类的动植物的健康。它们的结构和功能取决于控制微生物群落的组装,稳定性和演变的生态和环境相互作用。广泛认为的是,诸如竞争之类的拮抗相互作用在微生物群落中占主导地位,并且在生态上比协同的相互作用更重要,例如互动或共同主义。在过去的十年中,出现了更细微的图片,其中细菌,古细菌和真菌存在于交互式网络中,在这些网络中,它们交换基本和非必需的代谢物。这些代谢相互作用不仅会影响所涉及的菌株的生理,生态和进化,而且对许多(如果不是全部)微生物组的功能也是核心。因此,我们主张对微生物组生态学的平衡观点,该观点涵盖了协同和拮抗的相互作用,作为推动微生物群落中结构和动态的关键力量。

制定可持续交钥匙太阳能电池板的商业计划
摘要:随着全球对可再生能源的需求继续上升,太阳能成为一种杰出且可持续的能源解决方案。本文介绍了建立交钥匙太阳能电池板生产工厂的综合商业计划,重点是可持续性和环境责任。本文旨在解决对高质量太阳能电池板的市场需求不断增长的,同时最大程度地减少其环境足迹并有助于减少温室气体排放。业务计划概述了成功建立和运营太阳能电池板生产工厂所需的关键因素,包括市场分析,财务预测,运营策略和可持续性计划。通过检查太阳能市场的全球趋势,确定增长趋势,潜在的竞争对手和目标客户群来分析市场分析。结果表明,剩下的时间为16个月,分支点为30,112个单位。财务预测概述了拟议工厂的投资要求,收入预测和盈利能力期望。总而言之,该研究论文为建立交钥匙太阳能电池板生产工厂提供了结构良好的商业计划,该工厂不仅满足了对太阳能解决方案的不断增长的需求,而且还优先考虑可持续性和环境责任。本文提供的可再生能源解决方案为投资者提供了令人信服的机会,通过为不断增长的全球市场提供清洁可靠的能源解决方案,使财务增长与积极的影响保持一致。建议使用环保制造工艺,可回收材料的利用以及采用节能技术来最大程度地减少其碳足迹。

传统汽车凸极转子的开发
目录 章 页码 1. 介绍................................................................................................................ 1 2. 理论................................................................................................................... 6 2.1 直轴和交轴................................................................................................... 6 2.2 等效电路................................................................................................... 8 2.3 功率角特性................................................................................................... 9 3. 设计参数...................................................................................................... 11 3.1 气隙...................................................................................................... 11 3.2 磁通密度...................................................................................................... 12 3.3 定子和励磁绕组...................................................................................... 12 3.4 波形...................................................................................................... 13 3.5 电抗...................................................................................................... 13 3. 转子设计............................................................................................................. 15 4.1 机械...................................................................................................... 15 4.1.1 励磁绕组.

磁传感器三轴亥姆霍兹线圈的设计...
摘要:磁传感器元件的准确测量一直是磁场应用中的重要问题,但传感器系统中存在不可避免的误差,在使用前需要进行校正。常见的标量校正方法难以对传感器元件进行有效校正,因为它需要均匀稳定的背景磁场,并且依赖于磁场模量。因此,设计了一套可用于传感器矢量校正的三轴亥姆霍兹线圈,以产生受控的标准磁场。分析了线圈的设计指标、均匀区大小以及磁场与电流的关系,为传感器元件的有效校准提供依据。测量结果表明,本文设计的线圈的均匀区大小和磁场精度满足设计要求。同时,利用该线圈进行传感器阵列标定和磁目标定位,使传感器误差降低了3个数量级,磁目标定位精度达到0.1m,实用效果良好。
涡轴发动机的多点设计和优化...
NASA STI 计划在该机构首席信息官的支持下运作。它收集、组织、归档和传播 NASA 的 STI。NASA STI 计划提供对 NASA 技术报告服务器 — 注册 (NTRS Reg) 和 NASA 技术报告服务器 — 公共 (NTRS) 的访问,从而提供世界上最大的航空和空间科学 STI 集合之一。结果在非 NASA 渠道和 NASA 的 NASA STI 报告系列中发布,其中包括以下报告类型: • 技术出版物。已完成研究或重要研究阶段的报告,介绍 NASA 计划的结果并包含大量数据或理论分析。包括被认为具有持续参考价值的重要科学和技术数据和信息的汇编。NASA 同行评审的正式专业论文的对应部分,但对手稿长度和图形展示范围的限制不那么严格。• 技术备忘录。初步或具有专门兴趣的科学和技术发现,例如“快速发布”报告、工作文件和包含最少注释的参考书目。不包含广泛的分析。
评估人机系统中的多轴协作
摘要 由于大多数机器学习 (ML) 模型都是孤立地进行训练和评估的,因此我们对它们对现实世界中人类决策的影响知之甚少。我们的工作研究了这些部署的人机交互系统中如何产生有效的协作,特别是在不仅准确性而且偏差指标至关重要的任务上。我们训练了三种现有的语言模型(随机、词袋和最先进的深度神经网络),并在有和没有人类合作者的情况下在文本分类任务上评估它们的表现。我们的初步研究结果表明,虽然高精度 ML 提高了团队准确性,但它对偏差的影响似乎是特定于模型的,即使没有界面变化也是如此。我们将这些发现建立在认知和 HCI 文献的基础上,并提出了进一步发掘这种互动复杂性的方向。

单轴核心 - GE Aerospace
为了响应这一行动号召,GE 航空开发了 T901-GE-900(以前称为 GE3000),作为美国陆军航空兵的下一代涡轴发动机解决方案。更大的功率、更高的效率和更低的成本是这一大胆计划的重点,它将为未来的士兵配备我们国家所能提供的最佳发动机。通过与 Apache 和黑鹰战斗机建立值得信赖的合作伙伴关系,GE 创造了一款发动机,它能够提供战斗所需的性能,而不会牺牲单轴核心设计的维护简便性。单轴核心架构一直是陆军航空兵的支柱,也是目前运行的所有陆军涡轴发动机的首选设计。通过应用行业领先、成熟的技术,T901 能够轻松与陆军现有的直升机集成,同时超越性能要求。

MU-S600V - 5 轴立式加工中心
X、Y、Z、B、C、5轴控制、主轴控制:1轴 OSP全范围绝对位置反馈(无需原点返回) 机械坐标系(1套)、工件坐标系(20套) 8位小数、±99999.999~0.001mm、0.001˚ 小数:1µm、10µm、1mm(0.0001,1英寸)(1˚、0.01˚、0.001˚) 倍率:0~200% 直接主轴转速指令倍率30~300%、多点分度 注册刀具数:最多999套、刀具长度/半径补偿:每个刀具3套 15英寸彩色LCD+多点触摸面板操作 自动诊断和显示程序、操作、机械和NC系统故障 程序存储容量: 4 GB;操作备份容量:2 MB 程序管理、编辑、多任务、计划程序、固定循环、G/M 代码宏、算术、逻辑语句、数学函数、变量、分支命令、坐标计算、面积计算、坐标转换、编程帮助、夹具偏移 应用程序以图形方式可视化和数字化车间所需的信息 高度可靠的触摸屏,适合车间使用。一键访问套件应用程序。 “单一模式操作”完成一系列操作 高级操作面板/图形促进流畅的机器控制 MDI、手动(快速移动、手动切削进给、脉冲手柄)、负载计、操作帮助、报警帮助、顺序返回、手动中断/自动返回、脉冲手柄重叠、参数 I/O、PLC 监视器、对准补偿 机器
航空涡轴发动机市场
劳斯莱斯 250/RR300 型(涡轴发动机) 型号 T-O 单位/变体 功率等级 应用 机身 印度尼西亚航空航天 NBO-105 2 KAL 500D/MD 1 MBB BO 105 1 MD 直升机 500D/E 1 MBB BO 105 VBH; PAH-1 1 250-C20F 420 轴马力(313 千瓦) 欧洲直升机公司 AS 355 2 250-C20J 420 轴马力(313 千瓦) 贝尔直升机德事隆 206B-III JetRanger 1 贝尔直升机德事隆 TH-57 Sea Ranger 1 贝尔直升机德事隆 TH-67A Creek 1 250-C20R 450 轴马力(335 千瓦) 阿古斯塔 NH520N 2 贝尔直升机德事隆 206 LT Twin Ranger 2 贝尔直升机德事隆鹰眼 2 欧洲直升机公司 AS 355 2 250-C20R/1 450 轴马力(335 千瓦) 阿古斯塔 A109C; A109 C Max 2 250-C20R/2 450 轴马力(335 千瓦) 贝尔直升机德事隆 206B-III JetRanger 1 贝尔直升机德事隆 206L Long Ranger 1 卡莫夫 Ka-226 2 MD 直升机 500D/E 1 MD 直升机 520NOTAR 1 250-C20R/4 450 轴马力(335 千瓦) 贝尔直升机德事隆 206B III JetRanger 1 250-C20W 420 轴马力(313 千瓦) 恩斯特龙 480 1 施魏策尔 330/330SP;333; RQ-8A 1 250-C28B 500 轴马力(372 千瓦) 贝尔直升机 德事隆 206L-1 远程直升机 1 250-C28C 500 轴马力(372 千瓦) 欧洲直升机公司 BO 105LS 2 MD 直升机 530F 1 250-C30G/2 557 轴马力(415 千瓦) 贝尔 230 2 250-C30P 600 轴马力(447 千瓦) 贝尔直升机 德事隆 206L-III、IV 1 250-C40B 613 轴马力(457 千瓦) 贝尔直升机 德事隆 430 2 250-C47B 600 轴马力(447 千瓦) 贝尔直升机 德事隆 407 1 250-C47M 600 shp (447 kW) MD 直升机 600NOTAR 1 RR300 300 shp (223 kW) Robinson R66 1 价格范围。以下是 250 系列发动机的成本估算(以 2011 年美元计算):250-C20/28 系列,225,000-255,000 美元;C30/C40 系列,285,000-335,000 美元;T703 系列,300,000-325,000 美元。
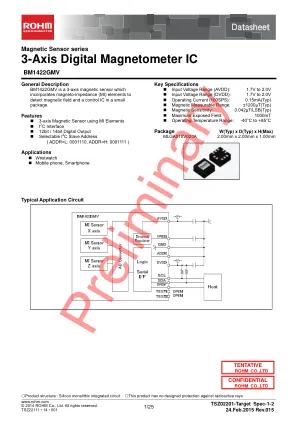
3 轴数字磁力计 IC -BM1422GMV-
名称 地址 位宽 R/W 功能 INFO 0x0D/0x0E 16 R 信息(0x0101) WIA 0x0F 8 R 我是谁(0x41) DATAX 0x10/0x11 16 R X 输出值 DATAY 0x12/0x13 16 R Y 输出值 DATAZ 0x14/0x15 16 R Z 输出值 STA1 0x18 8 R 状态1(DRDY) CNTL1 0x1B 8 R/W 控制设置1 CNTL2 0x1C 8 R/W 控制设置2 CNTL3 0x1D 8 R/W 控制设置3 PRET 0x30 8 R/W 预设时间 AVE_A 0x40 8 R/W 平均时间设置 CNTL4 0x5C/0x5D 16 R/W 控制设置4(LV复位释放) TEMP 0x60/0x61 16 R 温度值 OFF_X 0x6C/0x6D 16 R/W 偏移 X 值 OFF_Y 0x72/0x73 16 R/W 偏移 Y 值 OFF_Z 0x78/0x79 16 R/W 偏移 Z 值 FINEOUTPUTX 0x90/0x91 16 R 根据 OFFX 的 DATAX 值 FINEOUTPUTY 0x92/0x93 16 R 根据 OFFY 的 DATAY 值 FINEOUTPUTZ 0x94/0x95 16 R 根据 OFFZ 的 DATAZ 值 SENSX 0x96/0x97 16 R 灵敏度调整 X 值 SENSY 0x98/0x99 16 R 灵敏度调整 Y 值 SENSZ 0x9A/0x9B 16 R 灵敏度调整 Z 值GAIN_PARA_X 0x9C/0x9D 16 R 轴干扰 X 值 GAIN_PARA_Y 0x9E/0x9F 16 R 轴干扰 Y 值 GAIN_PARA_Z 0xA0/0xA1 16 R 轴干扰 Z 值 OFFZEROX 0xF8/0xF9 16 R 无磁场时偏移调整 X 值 OFFZEROY 0xFA/0xFB 16 R 无磁场时偏移调整 Y 值 OFFZEROZ 0xFC/0xFD 16 R 无磁场时偏移调整 Z 值