XiaoMi-AI文件搜索系统
World File Search System产品描述

产品描述产品组分使用指南相关产品无甘油DNA Pol I ...
储存和稳定性: 无甘油 DNA Pol I Klenow 片段( HC )采用蓝冰运输,应在到货后储存于 -20°C 下。应避免反复冻融循 环。 .有效期: 在外包装盒标签上的有效期内,在推荐条件下储存并正确处理时,试剂盒可保持完整活性。 安全预防措施: 处理试剂前请阅读并理解 SDS (安全数据表)。首次发货时提供 SDS 的纸质版文件,此后可应要求提 供。 质控: Meridian 遵守 ISO 13485 质量管理体系运行。无甘油 DNA Pol I Klenow 片段( HC )活性通过测量引物 延伸单链 DNA 并与参考酶进行比较来测定。无甘油 DNA Pol I Klenow 片段( HC )在检测放行前已经 过活性、纯度和核酸酶污染测试。 注: 仅供科研或进一步生产使用。
产品描述 - Land.Vic
Vicmap Elevation Coastal 1m DEM & 0.5m Contours 地理范围覆盖维多利亚州的整个海岸,包括菲利普岛和法国岛。沿海地区的覆盖范围通常从水线开始,直到地形高度达到约 10m。在陡峭的沿海地区,数据集从水线向内陆延伸约 500m。显示范围的地图可在附录 B - 范围地图中看到。内容 Vicmap Elevation 包含几个数据集: • 10-20 Contours & Relief 以等高线、点高和表面特征(包括悬崖、堤坝和岩石露头等)的形式表示维多利亚州的海拔。10-20 米等高线和点高程是用于创建 Vicmap DTM 20m 和 DTM 10m 的源数据集。• 1-5 等高线和地势是来自墨尔本大都会工程委员会从 1974 年到 1980 年代进行的调查的高程数据集。此数据集可以更详细地叠加墨尔本大都会区等高线。• DTM 20m 和 DTM 10m 数字地形模型 (DTM) 以 20 和 10m 网格分辨率表示维多利亚的地形表面。DTM20m 是全州范围的,DTM10m 覆盖率为 70%) • 沿海 1m DEM 和 0.5m 等高线 本产品说明仅详细介绍了沿海 1m DEM 和 0.5m 等高线产品。有关其他高程产品的更多信息,请参阅其各自的产品说明和元数据条目。Vicmap 高程 - 沿海 1m DEM 和 0.5m 等高线准确表示了维多利亚州沿海的自然地貌特征。它用于各种应用,包括规划、灾害缓解和环境建模。Vicmap 高程沿海 1m DEM 和 0.5m 等高线数据集包括: • 0.5m 等高线,以 0.5m 间隔的等高线形式表示维多利亚州的沿海高程。• 1m DEM 在规则网格上具有 1m 的空间分辨率(像素大小)。结构

WS3441A 产品描述
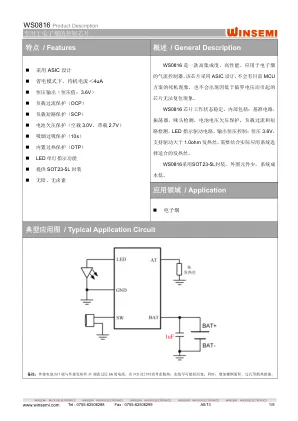
注意:1.我们强烈建议客户在购买我们的产品时仔细检查商标,如果有任何问题,请随时与我们联系。2.电路设计时请不要超过设备的绝对最大额定值。3.Winsemi Microelectronics Co., Ltd 保留对本规格书进行更改的权利,如有更改,恕不另行通知。

公司和产品描述
ThermAvant International 专门将军事和太空应用传热技术集成到消费产品中。我们推出的第一款主要产品是一款无需用电即可运行的调温旅行杯。它实际上是由火箭科学家设计的。这款旅行杯的首款产品名为 BURNOUT,它确实能将一杯滚烫的咖啡“烧开”。它通过将咖啡从危险的高冲泡温度立即冷却到完美的饮用温度来实现这一点。然后,它全天保持完美的温度范围,而不是冷却得太快。它还能让冷饮全天保持冰冷。BURNOUT 使用一种名为 HeatZorb 的生物基合成蜂蜡,它内置于不锈钢杯壁中,在非常特定的温度下融化。当将热饮倒入 BURNOUT 时,HeatZorb 会在其腔内融化,吸收并储存多余的热量,从而将饮料冷却到合适的温度。一旦达到最佳温度,HeatZorb 就会自动开始将储存的热量释放回饮料中,以保持全天最佳饮用温度。除了热性能外,BURNOUT 还可以用洗碗机清洗,并且由我们位于美国密苏里州的工厂制造。据我们所知,这使我们成为美国唯一一家不锈钢饮具制造商。从猎人到滑雪者,从办公室职员到卡车司机,咖啡和茶是大多数工作成年人的生命线。BURNOUT 的 Drinknow 技术只有一个使命。扑灭火灾。保持温度。

产品描述 - 视觉矢量化
VV Enroute ™ 是一款独立的 PC 版空中交通管制员培训程序。具体来说,它教授航路/区域环境中的基本雷达管制技能,达到高水平的表现。它假设学生在开始时没有任何空中交通管制经验或知识,因此它非常适合初级学生,但同样适合从其他 ATC 流转到监视环境的管制员。获得通用航空资格的学生也可以使用 VV Enroute ™ 来深入了解实际的 ATC 技术。

产品描述20/20Vision®7
•使用Pinkeye季节开始前3到6周•牛2ML剂量。皮下或肌肉内注射•建议在屠宰后60天内进行年度重新接种。可以在注射部位发生瞬时局部反应。如果发生过敏反应,会施用肾上腺素。可能与生物产物发生过敏反应,并可能导致泌乳牛的牛奶产量暂时减少。Key words PILIGUARD® Pinkeye-1 Trivalent, cattle vaccine, pinkeye, Moraxella bovis , Piliguard, Piliguard Pinkeye, Piliguard Trivalent PILIGUARD® Pinkeye + 7 Product description PILIGUARD® Pinkeye +7 is for use in healthy cattle to aid in the control of pinkeye associated with infection by Moraxella bovis and against diseases caused by Clostridium Chauvoei,C。Sespicum,C。Novyi B型,C。Sordellii和C. Perfringens型C和D.产品子弹

Voice.AI网关产品描述
6.1 机器人框架 ................................................................................................................ 21 6.2 对话发起功能 .............................................................................................................. 21 6.2.1 机器人的初始活动 .............................................................................................................. 21 6.2.1.1 将 SIP 标头传递给机器人 ...................................................................................... 21 6.2.2 在机器人提示时连接 ...................................................................................................... 22 6.2.3 向机器人发送初始消息 ...................................................................................................... 22 6.2.4 欢迎消息 ...................................................................................................................... 22 6.3 语音功能 ................................................................................................................ 22 6.3.1 STT 和 TTS 提供商 ................................................................................................ 22 6.3.2 语言 ............................................................................................................................. 22 6.3.3 自定义语言和 STT 上下文 ............................................................................................. 22 6.3.4 TTS 的 SSML ............................................................................................................. 23 6.3.5 连续 ASR ................................................................................................................23 6.3.6 STT 转录的标点符号 ..............................................................................................23 6.3.7 语音插入 ................................................................................................................24 6.3.8 TTS 缓存 ................................................................................................................24 6.4 呼叫控制 ......................................................................................................................25 6.4.1 呼叫转移 ................................................................................................................25 6.4.1.1 在呼叫转移时添加 SIP 标头 .............................................................................25 6.4.2 断开连接 ................................................................................................................25

Voice.AI 网关 - 产品描述
6.1 机器人框架 ................................................................................................................ 21 6.2 对话发起功能 .............................................................................................................. 21 6.2.1 机器人的初始活动 .............................................................................................................. 21 6.2.1.1 将 SIP 标头传递给机器人 ...................................................................................... 21 6.2.2 在机器人提示时连接 ...................................................................................................... 22 6.2.3 向机器人发送初始消息 ...................................................................................................... 22 6.2.4 欢迎消息 ...................................................................................................................... 22 6.2.5 使用占位符的动态参数设置 ................................................................................ 22 6.3 语音功能 ................................................................................................................ 22 6.3.1 STT 和 TTS 提供商 ................................................................................................ 22 6.3.2 语言 .......................................................................................................................... 22 6.3.3 自定义语言和 STT 上下文 ................................................................................................ 23 6.3.3.1 使用 Google Class Tokens 进行语音识别 ......................................................23 6.3.3.2 使用 Boosts 进行语音自适应 ..............................................................................23 6.3.4 TTS 的 SSML .............................................................................................................23 6.3.5 连续 ASR .........................................................................................................................24 6.3.6 覆盖 STT 参数以进行激活和流式传输 .............................................................................24 6.3.7 存储的 STT 转录 .........................................................................................................24 6.3.8 STT 转录的标点符号 .............................................................................................24 6.3.9 通过语音或 DTMF 输入进行插入 .............................................................................24 6.3.10 TTS 缓存 .............................................................................................................25 6.3.11 通过 STT 引擎进行音频记录 .............................................................................................25 6.4 将用户 DTMF 数字发送到机器人........................................................................... 25 6.5 通话期间失败时的活动 .............................................................................. 26 6.6 用户输入和 Bot/STT/TTS 响应的超时 .............................................................. 26 6.7 机器人的语音录制活动 ...................................................................................... 26

产品描述 Leica IPAS20
提供机载传感器数据的直接地理参考 Leica IPAS20 通过严格的卡尔曼滤波器将精确的 GNSS 解决方案与原始 IMU 测量相结合。Leica IPAS20 提供的 IMU 基于光纤、环形激光或干调陀螺仪技术。每种 IMU 类型都以高数据速率(从 200Hz 到 500Hz)测量精确的速度增量和角度增量。Leica IPAS20 将 IMU 测量的出色短期精度与 GPS 解决方案的长期稳定性相结合,在整个任务期间产生高度精确的位置、速度和方向。卡尔曼滤波器将同时估计来自加速度计和陀螺仪的误差。Leica IPAS20 还可以估计 GNSS 天线和传感器参考中心之间的杠杆臂。估计的实时解决方案(包括位置、速度和滚动、俯仰和航向)可用于飞行管理,也可用于控制其他传感器。滚动、俯仰和航向可以作为稳定支架(如 Leica PAV30)的数字信号输出,以提高支架的精度。或者,它们可以作为模拟信号输出以控制其他传感器功能,例如 Leica ALS50 激光扫描仪的滚动补偿。灵活且可扩展的机载系统 Leica IPAS20 系统由 Leica IPAS20 控制单元和集成的 GNSS 接收板、GNSS 天线、IMU 和软件组成。该系统专为所有类型的机载传感器而设计: