XiaoMi-AI文件搜索系统
World File Search System以弧

路易斯安那州新奥尔良的数字高程模型
1.简介 2010 年 4 月,美国国家海洋和大气管理局 (NOAA) 下属的国家地球物理数据中心 (NGDC) 开发了路易斯安那州新奥尔良的三个水深地形数字高程模型 (DEM)(图1)。这些 DEM 是根据 2009 年美国复苏与再投资法案 (ARRA) 1 为 NOAA 海岸调查发展实验室 (CSDL) 开发的,旨在评估 Vertical.Datum 的实用性。转换工具 ( VDatum ) 由 NOAA 海岸调查办公室 (OCS)、国家大地测量局 (NGS) 和业务海洋产品和服务中心 (CO-OPS) 联合开发 ( http://vdatum.noaa.gov/ )。参考 1988 年北美垂直基准 (NAVD 88) 的 1/3 弧秒 2 DEM 经过精心开发和评估。从 VDatum 派生的 NAVD 88 到平均高水位 (MHW) 1/3 弧秒转换网格。然后创建项目区域以模拟新奥尔良地区的 NAVD 88 和 MHW 之间的关系。NGDC 将 NAVD 88 DEM 和转换网格结合起来开发了 1/3 弧秒 MHW DEM。使用相同的过程生成平均低低水位 (MLLW) 1/3 弧秒转换网格。NAVD 88 DEM 是根据该地区的各种数字数据集生成的(网格边界和来源如图 1、5 和 10 所示),这些 DEM 将用于风暴潮淹没和海平面上升建模。本报告总结了开发三个新奥尔良 DEM 所使用的数据源和方法。

基于空间表征语义层次的机器人探索与绘图策略
许多科学家 [Lynch,1960;Piaget 和 Inhelder,1967;Siegel 和 White,1975] 已经观察到认知地图被组织成连续的层,并提出对大规模环境的有用且有力的描述的核心要素是拓扑描述。分层模型包括从局部感官信息中识别和辨认地标和地点;路线控制知识(从一个地方到另一个地方的过程);连通性、顺序和包含的拓扑模型;以及形状、距离、方向、方位以及局部和全局坐标系的度量描述。看来,认知地图的分层结构是人类在大规模空间中稳健表现的原因。我们的方法试图将这些方法应用于机器人探索和地图学习问题。我们定性方法中对环境的核心描述是拓扑模型,如 TOUR 模型 [Kuipers,1978]。该模型由一组节点和弧组成,其中节点代表环境中可识别的位置,弧代表连接它们的行进路径。节点和弧是根据机器人的感觉运动控制能力程序性定义的。度量信息添加到拓扑模型之上。
![arXiv:2502.02354v1 [cs.LO] 2025 年 2 月 4 日](/simg/d\d48731e0c9bcee63d92c7a739fb8e6e1c3cedf18.webp)
arXiv:2502.02354v1 [cs.LO] 2025 年 2 月 4 日
b 互斥,可以按任何顺序执行,但不能并发;在右侧,a 和 b 之间存在真正的并发,用 HDA 语义的实心方块表示。在交错语义中,两个网之间没有区别,两者都产生左侧的转换系统。van Glabbeek 在 [31] 中首次探讨了 Petri 网和 HDA 之间的关系,其中 HDA 被定义为带标签的前立方体集,其单元是不同维度的超立方体。最近,[13] 为 HDA 引入了一种基于事件的设置,将其单元定义为带标签事件的全序集。该框架导致了 HDA 理论的许多新发展 [4,5,14,16],因此我们在这里着手将 van Glabbeek 的翻译更新为这种基于事件的设置。Petri 网是一个强大的模型,可以表示无限系统,同时保留可达性 [25] 和可覆盖性 [23] 的可判定性。尽管 Petri 网具有表达能力,但它缺少一些表示程序执行所必需的特性。在 [17] 中,作者引入了抑制弧,当通过抑制弧连接到 t 的位置不为空时,它可以防止转换 t 触发。显然,这种构造允许实现零测试,这使得带有抑制弧的 Petri 网具有图灵能力。我们研究了带有抑制弧的 Petri 网的并发语义,表明 [21] 的后验语义再次产生了 HDA。然而,对于更自由的先验语义(再次参见 [21]),我们需要引入部分 HDA,其中一些单元可能缺失,模仿现在禁止某些并发执行序列化的事实。我们进一步将我们的工作扩展到 [11] 的广义自修改网,将它们的并发语义定义为 ST 自动机,而 ST 自动机本身又概括了部分 HDA。我们开发了一个原型工具,它实现了从 Petri 网到 HDA 的转换以及从 PNI 到部分 HDA 的转换。4 我们的实现能够以模块化方式处理标准、加权和抑制弧。本文的结构如下。我们在第 2 和第 3 节开始回顾 HDA 和 Petri 网,重点介绍它们的并发语义,这种语义允许多个转换同时触发。以下各节介绍了我们的适当贡献。在第 4 节中,我们介绍了基于 [31] 的从 Petri 网到 HDA 的转换。为了克服这样构建的 HDA 的对称性,第 5 节引入了事件顺序,避免了构造中的阶乘爆炸。我们还给出了几个例子来说明 HDA 语义中的细节。然后,我们在第 6 节中考虑了具有抑制弧的 Petri 网(后验和先验语义),在第 7 节中考虑了广义自修改网。第 8 节介绍了我们的实现。

真空电弧科学与技术手册
电弧可以定义为气体或蒸汽中两个电极之间的放电,其阴极电压降为气体或蒸汽的最小电离或最小激发电位的量级。电弧是一种自持放电,能够通过提供其自身的机制从负极发射电子来支持大电流。大自然自古以来就以闪电的形式为我们提供了电弧,但直到伏打电堆出现后,汉弗莱·戴维爵士才于 1810 年左右在实验室中首次研究了电弧。电弧可以由火花或辉光放电引发,也可以由两个带电电极之间的接触分离引发。当接触断开时,流过电极的电流会熔化并蒸发最后一个小接触点,留下金属蒸汽放电,如果外部电路的电阻较低,则该放电会发展成电弧。电弧可能存在于高气压或低气压的环境中,也可能只存在于其挥发电极的蒸汽中。大自然似乎从未预料到真空环境中会出现电弧。这是人类的发明。术语“真空弧”是错误的用词。真空弧的真正含义是真空环境中的金属蒸汽电弧。然而,由于真空弧这一术语很常用,并已被文献接受,因此它在这里保留下来,并成为本书的主题。真空弧燃烧在封闭的空间中,在点燃之前是高真空。这种电弧的一个特征是,在点燃后,如果能量密度足够高,它会通过消耗阴极(有时是阳极)产生自己的蒸汽。蒸汽被部分电离,提供导电等离子体以实现电极之间的电流传输。某些基本过程发生在所有类型的电放电中,包括电弧。这些单独的过程自大约 1900 年以来一直在研究。
2012 年技术培训指南 | 林肯电气
林肯电气焊接学校 焊接学校概述 .......................。。。。。。。。。。。。。。。。。。。。。。。。.....................6 焊接学校课程表 ...。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.............7-8 标准课程 焊接入门 ...........。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.9 基础板和钣金。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。10 管道焊接。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。11-12 等离子、火焰、合金和堆焊。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。13 钨极气体保护焊。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。14 熔化极气体保护焊 - 半自动。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。15 药芯焊丝电弧焊 - 半自动。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。16 综合计划。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 高级课程赛车运动 - 基础材料计划。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。18 赛车运动 - 先进材料计划。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 基本埋弧焊。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 高级埋弧焊。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.21 高级 API 管道焊接。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.22 GTAW (TIG) 管。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.23 CWI 预备课程、研讨会和考试。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。.......24 资格和认证培训 ...............。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25

马来西亚小型遥感卫星
- 基于 4 个(反作用轮)的 3 轴稳定 - 指向精度:< 0.2º (2σ) - 指向知识:1 弧分 (2σ) - 姿态感应:航向太阳传感器、精细太阳传感器、磁力计、星传感器、陀螺仪
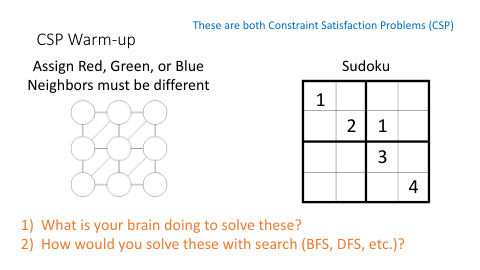
这些都是约束满足问题(CSP)
搜索问题 • 将实际问题表述为 CSP • 描述并实现回溯算法 • 定义弧一致性 • 描述并实现前向检查和 AC-3 • 解释 MRV 和 LCV 启发式方法之间的区别 • 理解一般二进制 CSP 和树结构的复杂性