XiaoMi-AI文件搜索系统
World File Search System会绕

2024年4月期 通期決算説明会
本介绍材料由Astroscale Holdings Inc.(以下简称“公司”或“ Astroscale”)编写。本演示材料包含基于我们当前的期望,估计和预测的陈述,对我们的前瞻性陈述和计划。这些陈述反映了我们的假设和前景,截至本演讲材料或其他特定日期的日期。不能保证这些前瞻性陈述将被实现。由于多种因素,实际结果可能与这些声明中提出的结果有所不同,包括各种因素,包括变化或不利于我们的使命的运营,客户计划和需求的变化,竞争,法律和监管环境的变化以及其他因素的变化。因此,必须注意避免对这些陈述提出不当信任。除非适用法律或证券交易所规则和法规规定,否则该公司没有义务根据后续发展更新或修改本演讲材料中包含的信息。

视觉锚定:利用视觉通过 UAS 绕目标运行...
符号 d tgt 到目标的欧几里德距离(斜距) DC 飞机与图像中心之间的地面半径 DX Y 轴截距与目标之间的地面距离 DY 飞机与 Y 轴截距之间的地面半径 DT 飞机与目标之间的地面半径 F b 机身框架连接到飞机 F c 相机框架连接到相机 F 中心 向心力 F n 北/东/下框架(惯性) g 地球重力加速度 h AGL 目标上方高度(地面以上) h des 所需轨道高度 KD φ 滚转内环微分增益 KD θ 俯仰内环微分增益 KD 外环微分增益 KI h 高度保持积分增益 KP h 高度保持比例增益 KP 外环外环控制器比例增益 KP ˙ ψ 转弯协调器比例增益 KP φ 滚转内环比例增益 KP θ 俯仰内环比例增益 LC 飞机与图像中心之间的斜距 LY 飞机与 Y 轴截距之间的斜距 LT飞机与目标之间的斜距 m 飞机质量 PE 位置向东 PN 位置向北 p 飞机倾斜率 q 飞机俯仰率 r 飞机航向(偏航)率 R 实际轨道半径 ˙ R 实际半径率 R des 所需轨道半径 S x 相机水平分辨率 S y 相机垂直分辨率 t 时间 VA 飞机空速 V CM / e 飞机相对于惯性系的速度 VW / e 风相对于惯性系的速度 V tgt / e 目标相对于惯性系的速度 W 飞机重量 X tgt 目标的 X 坐标 Y tgt 目标的 Y 坐标

由飞机牵引并绕轨道飞行的尾线天线的建模与控制
对几种控制线的稳态形状和风梯度引起的振动的候选方案进行了研究。使用经典振动链开发了计算机模拟,将自由/固定边界条件叠加在线的稳态形状和张力分布上。分析中考虑了几种形式的恢复力和耗散力。证明了叠加方法在很宽的操作范围内的有效性。开发了一种控制律,它调节拖曳机轨道半径,并证明了所有振动减少 50% 或更好的潜力。研究了第二种方案,即在线的尾端使用可控减速伞。可控减速伞在减少振动方面取得了有限的成功,但在调整线的稳态形状方面很有用。
由飞机牵引并绕轨道飞行的尾线天线的建模与控制
对几种控制线的稳态形状和风梯度引起的振动的候选方案进行了研究。使用经典振动链开发了计算机模拟,将自由/固定边界条件叠加在线的稳态形状和张力分布上。分析中考虑了几种形式的恢复力和耗散力。证明了叠加方法在很宽的操作范围内的有效性。开发了一种控制律,它调节拖曳机轨道半径,并证明了所有振动减少 50% 或更好的潜力。研究了第二种方案,即在线的尾端使用可控减速伞。可控减速伞在减少振动方面取得了有限的成功,但在调整线的稳态形状方面很有用。
由飞机牵引并绕轨道飞行的尾线天线的建模与控制
对几种控制线的稳态形状和风梯度引起的振动的候选方案进行了研究。使用经典振动链开发了计算机模拟,将自由/固定边界条件叠加在线的稳态形状和张力分布上。分析中考虑了几种形式的恢复力和耗散力。证明了叠加方法在很宽的操作范围内的有效性。开发了一种控制律,它调节拖曳机轨道半径,并证明了所有振动减少 50% 或更好的潜力。研究了第二种方案,即在线的尾端使用可控减速伞。可控减速伞在减少振动方面取得了有限的成功,但在调整线的稳态形状方面很有用。
由飞机牵引并绕轨道飞行的尾线天线的建模与控制
对几种控制线的稳态形状和风梯度引起的振动的候选方案进行了研究。使用经典振动链开发了计算机模拟,将自由/固定边界条件叠加在线的稳态形状和张力分布上。分析中考虑了几种形式的恢复力和耗散力。证明了叠加方法在很宽的操作范围内的有效性。开发了一种控制律,它调节拖曳机轨道半径,并证明了所有振动减少 50% 或更好的潜力。研究了第二种方案,即在线的尾端使用可控减速伞。可控减速伞在减少振动方面取得了有限的成功,但在调整线的稳态形状方面很有用。
实验动物与重组DNA专业委员会/主委动物饲养室名称...
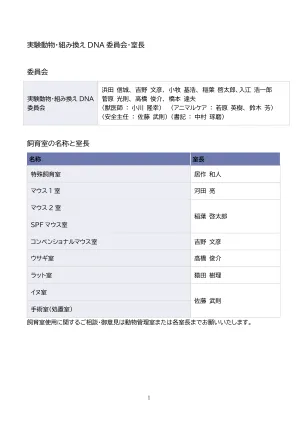
1. 申请日期 如您希望将动物带入实验动物设施,您必须提交实验计划,以便其在预计交付日期前至少 10 天送达实验动物和重组 DNA 委员会(以下简称“委员会”)。 2. 实验者姓名 1. 输入实际进行实验的人员的姓名。 2. 如果实验涉及多人,请尽可能列出所有人的姓名。 3.实验计划书中填写的姓名和购买动物的人的姓名(收据上的姓名)最好是同一个人。如果由于某种原因难以将购买者名称与实验计划名称统一,则应将购买者名称填写在实验计划的备注栏中。 3. 分机号码 1. 请务必记下可以联系到该人员的分机号码。 2. 请注意,如果输入了错误的分机号码,动物控制办公室将无法就您的动物与您联系。 4.实验计划编号 1.在实验计划上写上实验计划编号。这些实验计划编号在每个课程内都是连续的。 2.即使实验相同,如果交货日期不同,也要更改实验计划号。 3. 实验方案编号将作为带入动物的笼子编号写在标签卡上。 4.录入实验计划时,如果不知道实验计划号,请与动物管理处联系。 5. 拟使用的动物房(饲养室) 1. 输入饲养动物的饲养室名称。 2.根据饲养的动物种类和微生物等级不同,饲养室也不同,请注意不要弄错。 3.由于实验计划书中指定的动物房已经获得许可,因此原则上不允许在分娩前或分娩当天对动物房进行更改。 4.若实验计划书上所写的饲养室名称有误,动物饲养员会依据计划书上所写的信息将动物带入,并可能不会将其带入原本想要的饲养室。在这种情况下,一般规则是,动物在出生后不会被转移到所需的饲养室。

2024科学与工程学院毕业论文介绍
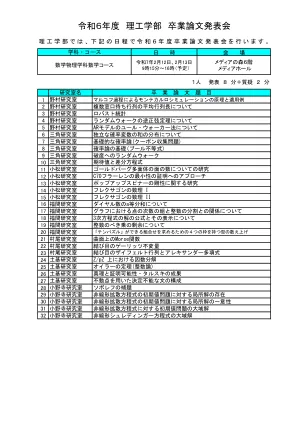
实验室名称1富士实验室2山摩托实验室3山原实验室4萨萨哈拉实验室5木马实验室6 Murata实验室7 Murata实验室8 Kawabata Laboratory 9 Kawabata实验室9 Okubo实验室10 Shibuo Laboratory 10 Shibuo实验室实验室11 Matsuoka Laboratory 12 Yamada Laboratory 13 YAMADA Laboratory 14 Okub sheratory 14 Okuubi fujiuchi 14 o实验室18 SASA实验室19 Shibuo实验室20 Noguchi实验室21 Fujiuchi Laboratory 22 Kawabata Laboratory 23 SASA实验室23 SASA实验室24 Noguchi Laboratory 25 Shibuo实验室25 Shibuo实验室26 IWAI实验室27 SASA实验室27 Sasa Laboratory 28 Kawabata Labotoration 28 Kawabata实验室29 Haseguchi Laguchi Laguchi Laboratory 30 Noguchi Laboratory 31 Noguchi Laboration 31 31 Murata实验室32 Fujiuchi实验室33 Yamada Laboratory 34 Fujiuchi Laboratory 35 Sakamoto Laboratory 36 SASA实验室37 Hasegawa Laboratory 38 Hasegawa Laboratory