XiaoMi-AI文件搜索系统
World File Search System位置控制

使用可变排量的高效流体动力系统...
当今民用运输飞机的高升力系统由使用阀控固定排量液压马达的动力控制单元 (PCU) 驱动。图 9 显示了带有 PCU 的传统高升力传动系统的典型后缘(襟翼)。由于可靠性原因,PCU 由两个独立的液压执行回路驱动。两个液压马达的速度由差速齿轮 (DG) 相加。如果单个液压系统发生故障,高升力系统可以半速运行。整个传动系统的位置通过释放压力制动器 (POB) 来设置。使用 VDHM 驱动的 PCU 可实现平稳的启动和定位序列。此外,它还可以对高升力系统进行稳定的位置控制。(1)、(2)

用于表面改性、注入和分析的纳米级多电荷聚焦离子束平台
PELIICAEN(纳米级离子注入控制和分析研究平台)装置是一种独特的设备,它拥有所有的原位超高真空设备(聚焦离子束 (FIB) 柱、二次电子显微镜 (SEM)、原子力和扫描隧道显微镜 (AFM/STM)),以及它在材料上的纳米结构性能。该装置最近配备了自己的电子回旋共振离子源、使用气动振动绝缘体的新型位置控制平台和快速脉冲装置。它的性能得到了大幅提升,可以选择多种离子,离子注入深度可调至几百纳米,图像分辨率低至 25 纳米,样品上的离子束尺寸低至 100 纳米。凭借所有这些设备,PELIICAEN 装置在执行和分析离子注入和表面改性方面处于国际前沿。

微电子研究所提供的博士项目列表(...
该项目将利用“边缘纳米系统”计划中开发的功能。这项工作旨在利用和扩展微电子技术的功能,以创建新一代先进芯片,用于探测微电子技术提供的大规模生物现象。学生将致力于创建先进结构,与悬浮在流体中的粒子相互作用,以实现不同的功能,包括对粒子/细胞进行灵巧的位置控制以及表征单粒子质量。这些先进的工具既可用于基础研究,也可用于食品/营养加工,包括在短时间内对大量粒子/细胞进行统计映射。该项目的成果和能力将有助于推动微电子技术的未来,包括渗透到生物制剂等重要的新兴应用中,为真正的跨学科工作创造一个强大的平台。 Navab Singh 博士
控制 - 东芝空调
东芝提供多种本地控制产品,可用于从与单个室内机或室内机组相邻的位置控制单个室内机或多达 8 个室内机组。可以将这些本地控制器安装在距离所连接室内机 500 米* 以内的地方,从而在设计安装时提供更大的灵活性。这还提供了将本地控制器安装在远离所连接室内机的区域的机会,例如,在公共使用区域,本地用户不应更改室内机操作,但可能需要由现场工程师从控制室进行监控。东芝目前提供两种不同类型的本地遥控器,它们是:有线遥控器,它是适用于大多数应用的标准本地控制设备;无线遥控器,它由一个通用手持设备组成,可以与 4 种不同的无线接收器单元一起购买,这些单元专门设计用于适合不同的室内机型号。

科学期刊
流体逻辑电路通过消除笨重的组件来简化系统设计,同时在与电子设备不符的一系列敌对环境中启用操作,但以有限的计算能力和响应时间为代价。本文提出了针对快速切换时间,减少组件计数,低单位成本和高复发性优化的四端流感晶体管,以实现复杂的流体控制电路,同时保持每分钟升高的流量。使用三个流体晶体管的环振荡器达到了振荡频率,最多可达到一个kilohertz,具有完全信号传播,可容忍数十亿个循环而不会失败。基本处理器电路,例如完整的加法器和3位类似物对数字的转换器,每个晶体管都只需要七个晶体管。解码电路驱动高分辨率的软性触觉显示,其刷新时间低于人类的潜伏期感知阈值,而无电子控制电路对气动执行器进行了闭环位置控制,并具有干扰抑制作用,从而证明了跨域的值。

PMSM 伺服执行器预测的简化监控模型
摘要。基于永磁同步电动机 (PMSM) 的机电执行器 (EMA) 目前用于各种飞机系统,并且在安全关键应用中越来越广泛。与其他电机相比,PMSM 具有高功率重量比和低齿槽效应:这使它们适合位置控制和致动任务。EMA 在模块化、机械简单性、整体重量和燃油效率方面比液压伺服执行器具有多项优势。同时,与液压执行器相比,它们的基本可靠性固有较低。然后,将 EMA 用于安全关键飞机系统需要采用风险缓解技术来解决这个问题。在此框架中,诊断和预测策略可用于系统健康管理,以监视其行为以寻找最常见或最危险故障模式的早期迹象。我们提出了一种基于 PMSM 的 EMA 低保真模型,用于基于模型的诊断和预测监测。该模型具有计算成本低的特点,允许近乎实时地执行,并且在模拟故障系统操作时具有适当的精度。通过将其行为与用作模拟测试台的更高保真度模型进行比较来验证此简化的模拟器。
自稳定激光金属沉积中粉末收集效率与层高之间的相互作用
在激光金属沉积 (LMD) 中,沉积轨道的高度会在层内和层间发生变化,从而导致工艺演变过程中出现显著偏差。先前的研究表明,在某些条件下会出现一种自稳定机制,保持高度有规律地增长,并保持零件和沉积喷嘴之间的恒定距离。在这里,我们分析了粉末收集效率和沉积高度稳定性之间的联系。为此,开发了一种监测系统来研究不同工艺条件下的沉积,使用在线测量样品重量并结合同轴光学三角测量获得的层高信息。使用分析模型根据高度监测和工艺参数实时估算沉积效率,并通过直接质量测量对其进行了验证。结果表明,轨道高度稳定与粉末收集效率降低有关,而粉末收集效率受熔池相对于粉末锥和激光束的相对位置控制。对于给定的一组参数,可以估算出间距以实现最高的粉末收集效率和通过构建方向的规则高度。
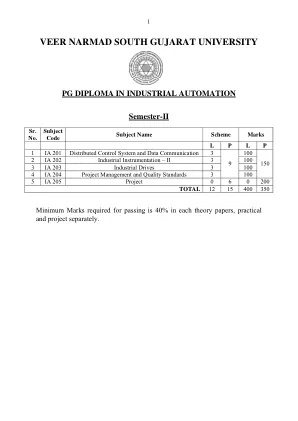
工业自动化研究生文凭 第二学期
1.感应电机驱动研究。2.交流驱动器的 V/F 和矢量控制操作模式研究。3.交流驱动器参数研究 – I。4.交流驱动器参数研究 – II。5.将交流驱动器与 PLC-I 连接。6.将交流驱动器与 PLC-II 连接。7.使用微控制器设计步进电机驱动器。8.带编码器反馈的 PMDC 驱动器设计。9.伺服驱动与位置控制研究。10.DCS-I研究。11.DCS-II研究。12.HMI研究。13.HMI配置-I。14.HMI配置-II。15.HMI配置-III。16.SCADA研究。17.SCADA 配置 - I.18.SCADA 配置 - II.19.SCADA 配置 - III.20.基于 PC 的 DAS-I 研究 21.基于 PC 的 DAS-II 研究 22.数据通信协议研究 - I.23.数据通信协议研究 - II.24.控制阀研究 - I.25.控制阀研究 - II.26.位移传感器的研究。27.液位测量的研究。28.应变计和扭矩测量的研究。29.在 MATLAB 上进行过程控制仿真 - I。30.在 MATLAB 上进行过程控制仿真 - II。31.在 MATLAB 上进行过程控制仿真 - III。

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和负载减轻的非线性控制架构。通过利用控制冗余,可以在不降低刚体指令跟踪性能的情况下减轻阵风和机动负载。所提出的控制架构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低传统滑模控制方法的模型依赖性和最小可能增益。此外,姿态动力学为严格反馈形式;因此采用增量反步滑模控制。此外,还设计了一种新型负载参考生成器,用于区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点

基于数值方法的动态补偿的航空操纵器机器人的多任务控制
本文提出了一种用于空中操纵器的控制方案,该方案允许解决不同的运动问题:最终效应器位置控制,最终效应器轨迹跟踪控制和路径遵循控制。该方案具有两个级联的控制器:i)第一个控制器是基于数值方法的最小范数控制器,它仅通过修改控制器引用就可以解决三个运动控制问题。另外,由于空中操纵器机器人是一个冗余系统,即,完成任务具有额外的自由度,可以按层次顺序设置其他控制目标。作为控制的次要目标,提议在任务过程中维持机器人臂的所需配置。ii)第二个级联控制器旨在补偿系统的动力学,其中主要目的是将速度误差驱动到零。提出了机器人系统的耦合动态模型(己谐和机器人臂)。该模型通常是根据力和扭矩的函数开发的。但是,在这项工作中,它是参考速度的函数,这些速度通常是这些车辆的参考。通过相应的稳定性和鲁棒性分析给出了提出的对照算法。最后,为了验证控制方案,在部分结构化的环境中进行实验测试,其空中操纵器与空中平台和3DOF机器人臂相符。