XiaoMi-AI文件搜索系统
World File Search System位高管

1 2 3 1 高知 (06) 高空作业车作业等 高知驻军 ...
6 一般事项 (1) 承包商应提供所使用的高空作业平台。 (2)高空作业车的操作应由承包商进行。 (3)承包商应负责将货物运至使用现场和运离使用现场。 (4)承包商应承担工作期间和装卸时使用的燃料费用。 (5)在开展工作前,必须向主管部门提交高空作业平台操作人员的驾驶执照副本。

智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。
哲学硕士学位(微电子学)课程及理学...
修读“项目报告”的学生须修读以下七门选修学科单元/科目,以获得21 学分;修读“实习及报告”的学生须修读以下八门选修学科单元/科目,以获得24 学分︰ 集成电路研究方法和应用选修45 3 数字集成电路选修45 3 数据转换器集成电路设计选修45 3 柔性交流输电系统选修45 3 电源管理集成电路设计选修45 3 生物医学工程专题选修45 3

大幅缩短高强度粘合剂的开发时间<研究成果
Harutoshi Yamada、Teruki Tsurimoto(筑波大学纯粹与应用科学研究生院)、Sirawit Pruksawan 和 Naito(筑波大学纯粹与应用科学研究生院、国家材料科学研究所)

高压电气设备检查 - 防卫省/自卫队
1. 参加者应具备的资格 (1) 参加者不得有《预算会计审计法》第70条规定的情况。此外,未成年人、被监护人或接受协助的人,即使已经取得订立合同所必需的同意,也属于同一条款内有特殊事由的情况。 (2)不属于《预算会计审计法》第七十一条规定情形的。 (3)2022、2023、2024年度防卫省竞争性投标资格(各省厅统一资格)“提供服务等”类别中被评为D级以上,且具备参加关东、甲信越地区竞争性投标资格的,或者,如果其不具备参加竞争性投标的资格,但在投标之日前已经通过竞争性投标资格审查,并在竞争性投标资格名单中登记,并被认定具备参加竞争性投标资格的。 (4)该人目前不属于防卫省长官房长官、防卫政策局局长、采购技术后勤局局长(以下称为“防卫省暂停权限”)或海上自卫队参谋长根据“设备等及服务采购暂停提名等指南”采取的暂停提名措施的对象。 (5) 与前项规定暂停指定对象者有资本或人事关系,且无意与国防部签订与其同类物品买卖、制造或承包服务契约者。 (6)目前处于暂停提名状态的人员原则上不允许进行分包。但有关部会暂停提名权机关认定确有不可避免的情况时,不在此限。

利用人工智能(AI)技术提高繁殖率
建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术建立评估和优化营养状况的技术
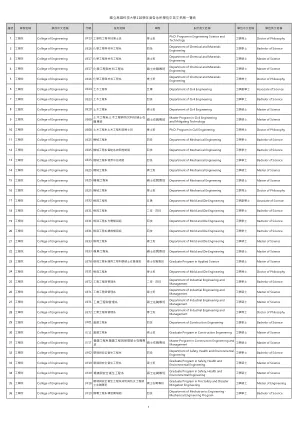
国立高雄科技大学110学年度各系所学位中英文名称一览表
46 电机与资讯学院College of Electrical Engineering and Computer Science UB02 电机工程系智慧自动化系统硕士在职专班硕士在职专班Graduate Program in Intelligent Automation Systems 工学硕士Master of Science