XiaoMi-AI文件搜索系统
World File Search System倾转旋翼

在倾转旋翼试验台上对贝尔 699 转子进行声学评估
40 : a) 直升机模式 ( μ = 0.125, C T /σ = 0.075, α s = 0°, M AT = 0.770), b) 过渡模式 ( μ = 0.125, C T /σ = 0.0493,α s = -45°,MAT = 0.767),以及 c) 飞行模式 ( μ = 0.0328,C T /σ = 0.0549,α s = - 90°,MAT = 0.770)。................................................ . ……………………………… ...................... 49
旋翼机问题列表 - 2024 年第四季度
AC 27-1B 和 AC 29-2C 中的指导不包含姿态系统的安装性能标准。AC 20-181 和 RTCA/DO-334 确实定义了不使用万向节传感器的捷联式 AHRS 的最低操作性能标准。但是,这些标准在 AC 27-1B 或 29-2C 中没有引用。不使用万向节传感器的捷联式 AHRS 系统的使用增加,其中可能包括校正对数,从固定翼过渡到旋翼机设计。这种转变给旋翼机安装带来了一些性能挑战。其中一些设计使用了固态加速度计(每个飞行轴一个),难以区分旋翼机运动和安装平台的正常振动频谱。此外,所使用的某些对数依赖于参数,在旋翼机低速环境中,这些参数会导致不可接受的误差。其他垂直起降飞机(如倾转旋翼机)也可能存在类似问题。DO-334 还定义了与传统旋翼机相关的可接受机动;但是,这可能不涵盖其他类型 VLOAL 的所有适当飞行测试参数,即:倾转旋翼机转换模式。在这些情况下,可能需要一份问题文件来定义额外的飞行测试机动。DO-334 表 2-1 定义了安装姿态性能的可接受性能标准,针对表 3-1 中定义的机动的动态条件类别 A5。除了表 2-1 中定义的机动之外,倾转旋翼机可能还需要其他机动。对于旋翼机/倾转旋翼机安装,DO-334 附录 A - 使用模拟验证设备性能是不可接受的。
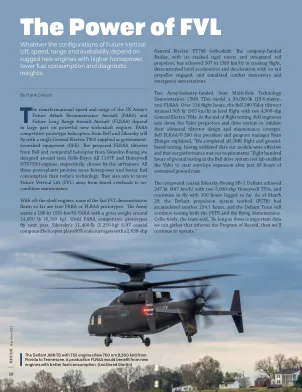
FVL 的力量 - 垂直飞行协会
两架由陆军/工业界资助的联合多用途技术演示机 (JMR TD) 模拟了 30,000 磅(13.6 公吨)的 FLRAA。在 214 个飞行小时中,Bell 280 Valor 倾转旋翼机在两台 4,500 轴马力的通用电气 T64 发动机的平飞中达到了 305 kt(565 km/h)的速度。在飞行测试结束时,Bell 工程师拆除了 Valor 螺旋桨和驱动系统,以验证其先进的倾转旋翼机设计和维护概念。Bell FLRAA/V-280 副总裁兼项目经理 Ryan Ehinger 解释说:“我们完成了所有 JMR 飞行和地面测试,验证了我们的模型是有效的,并且我们的性能符合我们的要求。”在贝尔驱动系统测试实验室进行了 800 小时的地面测试后,Valor 仅经过 43 小时的限制地面运行便可开始进行包络扩展。

自下而上的审查报告
建立总体部队结构 ................................................................................................ 27 ................................................................................................................ 现代化 33 .............................................................................................................. 战区空军 35 .............................................................................................. 攻击和侦察直升机 39 ...................................................................................................... 弹道导弹防御 43 航空母舰 ............................................................................................................. 49 ............................................................................................................. 攻击潜艇 55 ............................................................................................................. 航天发射 59 军用卫星通信 ............................................................................................. 65 V-22 鱼鹰倾转旋翼机 ............................................................................................. 69

基于 LPV 模型的 eVTOL 飞机自适应 MPC 运行过程中...
摘要:本文将新颖的 LPV(线性参数变化)模型和 MPC(模型预测控制)方法应用于电动垂直起降飞机的倾斜过渡过程,该飞机具有六个分布式电动旋翼和固定翼,用于平飞,其中两个旋翼可倾斜以在从悬停到稳态平飞的倾斜过渡期间产生可变推力矢量,其余四个旋翼不能倾斜。在平飞过程中,固定翼引起的气动升力保持飞行高度。基于由倾转旋翼角位置和故障旋翼速度预定的标称倾斜轨迹,通过沿倾斜轨迹线性化非线性 eVTOL 飞机模型,基于显著减少的线性时不变模型数量构建了离散时间 LPV 模型,其中倾转旋翼角度和故障旋翼速度可以实时测量。提出了一种基于σ移位H 2 范数的LPV建模误差评估方法,并设计了具有动态参考补偿的自适应模型预测控制器。仿真研究表明,基于转子故障倾斜过渡LPV模型的自适应MPC策略是成功的。

鹰眼 - Epic.org
简介 ................................................................ 4 背景/历史 ...................................................... 6 成就总结 ...................................................... 7 倾转旋翼机的优势 .............................................. 8 倾转旋翼机无人机飞行包线 ...................................... 9 多任务应用 ...................................................... 10 一般特性 ...................................................... 12 外部尺寸 ...................................................... 14 操作特性 ...................................................... 16 机身 ...................................................................... 18 发动机 ................................................................ 20 驱动系统 ...................................................... 21 螺旋桨 ................................................................ 22 燃油系统 ................................................................ 24 航空电子设备 ................................................................ 25 电气系统和电池 ................................................ 26 起落架 ................................................................ 27 甲板阻拦系统 ........................................................ 28 鹰眼甲板阻拦探头和挂钩 .................................. 29 地面控制站/数据链 .................................................. 30 鹰眼数据链系统 .................................................. 31 可部署性 .................................................................. 34 可达性 .................................................................. 35 支持设备................................................ 38 维护规定 ................................................ 40 美国海岸警卫队海上人员配备 ................................ 42 培训 .............................................................. 43 附录 A [ 美国海岸警卫队选定的任务设备 ]........................................ 45 FLIR Star SAFIRE TM III................................ 46 Telephonics RDR 1700 雷达 ................................ 47 Sierra Nevada UCARS ........................................ 48 联系信息 ........................................................ 50 © 2005 Bell Helicopter Textron Inc ................ 51
WYVER 重型垂直起降飞机 - 垂直飞行协会
执行摘要................................................................................................................................................ 4 1. 简介................................................................................................................................................... 9 2. 设计理念................................................................................................................................... 10 2.1 任务要求................................................................................................................................. 11 2.2 飞机配置权衡研究................................................................................................................. 11 2.2.1 串联设计评估.................................................................................................................... 12 2.2.2 倾转旋翼设计评估.................................................................................................................... 15 2.2.3 三旋翼设计评估.................................................................................................................... 17 2.3 权衡研究结论.................................................................................................................... 19 3. Wyver:设计亮点............................................................................................................................. 21 旋翼毂和动力叶片折叠.............................................................................................................
量子技术与军事——革命还是炒作?
Daniel Choi 上尉于 2017 年通过纽约州伊萨卡康奈尔大学海军预备役军官训练团加入海军陆战队,拥有数学学士学位。在担任贝尔波音 MV-22B 鱼鹰倾转旋翼机飞行员后,他进行了横向调动,目前担任第三海军陆战队远征军的情报官。本文仅代表作者的观点。它们不一定反映海军陆战队大学、美国海军陆战队、海军部或美国政府的观点。

2022 年 2 月 24 日,14 CFR § 61 豁免申请。
1 美国运输部联邦航空管理局《航空信息手册》(附第 1 号变更),2016 年 5 月 26 日 2 14 CFR § 97.3 程序中使用的符号和术语。[如本部分规定的标准仪表程序中使用的那样——飞机进近类别是指基于速度 VREF(如果指定)或如果未指定 VREF,则为最大认证着陆重量下的 1.3 Vso 的飞机分组。VREF、Vso 和最大认证着陆重量是注册国认证机构为飞机确定的数值。类别如下——(1)A 类:速度低于 91 节。* * * 3 G-1 问题文件是根据 FAA 咨询通告 20-166 4. d. 对飞机认证基础的编纂;日期为 2010 年 6 月 15 日 4 FAA G-1 问题文件第 2 阶段,AW609 认证基础;日期:2016 年 6 月 6 日:AW609 认证基础,子部分 A - 一般规定,§ TR 1 适用性包括新的章节引用“TR”,它要么是新要求,要么是来自 14 CFR 第 23/25/29 部分的编辑/修改段落;并且,(c) 认证基础中使用的术语应解释如下:“旋翼机”、“A 类旋翼机”是指“倾转旋翼机”。 “飞机”是指“倾转旋翼机”。 “副翼”、“襟翼”是指“副翼”。 “方向舵”是指“方向控制”。 “旋翼、螺旋桨”是指“螺旋桨”。

扩展现实飞行模拟与控制实验室
耦合飞行动力学、空气力学和气动声学模拟 § 线性化、稳定性、降阶、控制 § 实时空气力学和声学 § 实时交互空气动力学 § 旋翼飞行器(直升机、倾转旋翼机等)§ 扑翼微型飞行器(昆虫、鸟类) 先进飞行控制系统 § 旋翼机飞行控制系统 § 主动降噪飞行控制律 § 主动旋翼振动飞行控制律 感知建模和飞行员提示方法 § 全身触觉反馈 § 多模态飞行员建模 § 自转/舰载着陆提示算法