XiaoMi-AI文件搜索系统
World File Search System关键技术

智能采煤机器人关键技术
摘 要: 采煤机是综采工作面的核心装备,研发智能采煤机器人是实现综采工作面智能化的关键。 综合分析当前采煤机机器人化研究进程中的传感检测、位姿控制、速度控制、截割轨迹规划与跟 踪控制等技术的研究现状,提出研发智能采煤机器人必须破解的 “ 智能感知、位姿控制、速度控制、 截割轨迹规划与跟踪控制、位 − 姿 − 速协同控制 ” 五大关键技术,并给出解决方案。针对智能感知 问题,提出了构建智能感知系统思路,给出了智能采煤机器人智能感知系统的架构,实现对运行 状态、位姿、环境等全面感知,为智能采煤机器人安全、可靠运行提供保障;针对位姿控制问题, 提出了智能 PID 位姿控制思路,给出了改进遗传算法的 PID 位姿控制方法,实现了智能采煤机器 人位姿精准控制;针对速度控制问题,提出了融合 “ 力 − 电 ” 异构数据的截割载荷测量思路,给出 了基于神经网络算法的截割载荷测量方法,实现了截割载荷的精准测量;提出牵引与截割速度自 适应控制思路,给出了人工智能算法牵引与截割速度决策方法和滑模自抗扰控制的牵引与截割速 度控制方法,实现了智能采煤机器人速度精准自适应控制;针对截割轨迹规划与跟踪控制问题, 提出了截割轨迹精准规划思路,给出了融合地质数据和历史截割数据的截割轨迹规划模型,实现 了截割轨迹的精准规划;提出了截割轨迹精准跟踪控制思路,给出了智能插补算法的截割轨迹跟 踪控制方法,实现了智能采煤机器人截割轨迹高精度规划与精准跟踪控制;针对 “ 位 − 姿 − 速 ” 协同 控制问题,提出了 “ 位 − 姿 − 速 ” 协同控制参数智能优化思路,给出了基于多系统互约束的改进粒子 群 “ 位 − 姿 − 速 ” 协同控制参数优化方法,实现了智能采煤机器人智能高效作业。深入研究五大关键 技术破解思路,有利于加快推动研发高性能、高效率、高可靠的智能采煤机器人。

高阶自智网络关键技术及应用
architecture: driving forces, features, and functional topology [J]. Engineering, 2022, 8: 42-59. DOI: 10.1016/j.eng.2021.07.013 [2] 中国移动 . 中国移动自智网络白皮书 (2023) [R]. 2023 [3] TM Forum. Autonomous networks: empowering digital transformation [R].2023 [4] OpenAI. ChatGPT plugins [EB/OL]. [2024-06-15]. https://openai.
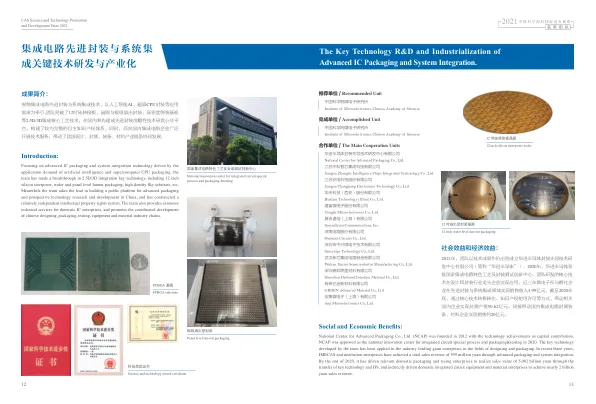
集成电路先进封装与系统集成关键技术研发与产业化
国家高级包装公司有限公司(NCAP)成立于2012年,其技术成就作为资本贡献。NCAP被批准为2020年的国家综合电路特殊过程与包装与测试中心。团队开发的关键技术已应用于设计和包装领域的行业领先巨头企业。最近三年,IMECAS和Invubation Enterprises通过高级包装和系统集成获得了3.99亿元的总销售收入。到2020年底,它已驱动了相关的国内包装和企业,通过转移关键技术和IPS的转移,并间接驱动了国内综合电路设备和材料企业,以实现近20亿元的元素销售收入。

陆地巡检机器人关键技术及其在水产养殖中的应用前景
陆地巡检机器人在执行各种任务时,需要感知周围 环境、定位自身位置、识别目标对象等,这些功能的实 现都依赖于传感器为机器人提供与外部环境交互的 “ 感 知器官 ” 。传感器是陆地巡检机器人的重要组成部分, 能够感知周围环境并获取相关信息,帮助机器人感进行 自主导航、避障、监测、抓取等工作。曹现刚等 [ 13 ] 设计 一种固定柔性轨道式悬挂巡检机器人平台,以解决煤矿 井下特种巡检机器人在三维环境重建和非结构环境运动 轨迹规划等关键技术,利用轨道,降低轨道铺设,为煤 矿环境巡检提供新的特种巡检平台。张书亮等 [ 14 ] 研究了 室内移动机器人的定位问题,提出融合轮式里程计、惯 性测量单元 IMU(inertial measurement unit) 、超宽带 UWB(ultra wide band) 和激光雷达定位数据的方法,依次 对不同传感器的定位数据进行融合,提高室内移动机器 人的定位精度。梁莉娟等 [ 15 ] 建立场景环境坐标系,利用 传感器探测出障碍物信息,对探测到的障碍物进行定位, 制定激光近场探测传感器的动态避障行为。李琳等 [ 16 ] 提 出基于条纹式激光传感器的机器人焊缝跟踪系统,采用 机器人末端安装条纹激光传感器,通过小波变换模极大 值理论分析焊缝轮廓,确定焊缝特征点。王正家等 [ 17 ] 提 出一种基于多传感器的机器人夹取系统,融合机器人内 置传感器所测量的位置、速度和角度等信息,利用外置 传感器完成对目标物的自动识别与定位。 2.1.1 传感器的使用场景及应用分类
国防关键技术
致国防部采购、技术和后勤科学技术总监、国防部副部长的备忘录 主题:国防科学委员会和国防科学顾问委员会关键技术联合工作组的报告。 我们很高兴转发国防科学委员会 (DSB) 和国防科学顾问委员会 (DSAC) 关键技术联合工作组的最终报告。这是美国国防部和英国国防部之间的首次科学委员会合作。在本报告中,联合工作组研究了对于满足美国和英国国防需求至关重要的五个主要转型技术领域。这些技术领域包括:先进指挥环境、持续监视、小型分布式网络传感器的电源/管理、高性能计算、国防关键电子元件。工作组得出结论,美国和英国在关键技术领域的领先地位正受到威胁,商用现货技术不足以满足美国和英国在这些领域的国防需求。工作组发现,政府投资对于确保技术发展转化为军事能力至关重要,并且,在选定的关键技术上进行合作符合美国和英国的利益,以帮助国防部和国防部保留
国防关键技术
致国防部采购、技术和后勤科学技术总监、国防部副部长的备忘录 主题:国防科学委员会和国防科学顾问委员会关键技术联合工作组的报告。 我们很高兴转发国防科学委员会 (DSB) 和国防科学顾问委员会 (DSAC) 关键技术联合工作组的最终报告。这是美国国防部和英国国防部之间的首次科学委员会合作。在本报告中,联合工作组研究了对于满足美国和英国国防需求至关重要的五个主要转型技术领域。这些技术领域包括:先进指挥环境、持续监视、小型分布式网络传感器的电源/管理、高性能计算、国防关键电子元件。工作组得出结论,美国和英国在关键技术领域的领先地位正受到威胁,商用现货技术不足以满足美国和英国在这些领域的国防需求。工作组发现,政府投资对于确保技术发展转化为军事能力至关重要,并且,在选定的关键技术上进行合作符合美国和英国的利益,以帮助国防部和国防部保留

国防关键技术
致国防部采购、技术和后勤科学技术总监、国防部副部长的备忘录 主题:国防科学委员会和国防科学顾问委员会关键技术联合工作组的报告。 我们很高兴转发国防科学委员会 (DSB) 和国防科学顾问委员会 (DSAC) 关键技术联合工作组的最终报告。这是美国国防部和英国国防部之间的首次科学委员会合作。在本报告中,联合工作组研究了对于满足美国和英国国防需求至关重要的五个主要转型技术领域。这些技术领域包括:先进指挥环境、持续监视、小型分布式网络传感器的电源/管理、高性能计算、国防关键电子元件。工作组得出结论,美国和英国在关键技术领域的领先地位正受到威胁,商用现货技术不足以满足美国和英国在这些领域的国防需求。工作组发现,政府投资对于确保技术发展转化为军事能力至关重要,并且,在选定的关键技术上进行合作符合美国和英国的利益,以帮助国防部和国防部保留
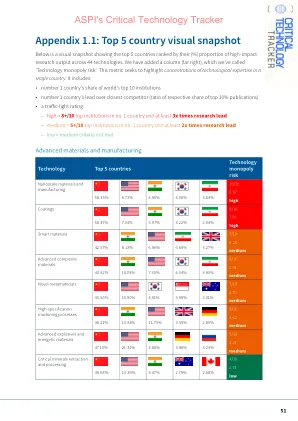
ASPI 的关键技术追踪
下面是一个直观的快照,显示了按 44 项技术领域高影响力研究成果占比 (%) 排名的前 5 个国家。我们添加了一列(最右边),我们称之为“技术垄断风险”。该指标旨在突出单个国家/地区的技术专长的集中度。它包括: