XiaoMi-AI文件搜索系统
World File Search System几毫米

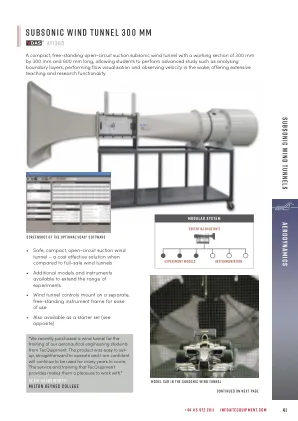
亚音速风洞 305 毫米
该装置安装在 AF1300 风洞的控制和仪表框架上。该装置包含 32 个经过校准的压力传感器。每个传感器的输入连接均通过安装在装置前面板上的快速释放压力输入进行。这样可以轻松快速地连接装置和安装在风洞中的实验。所有压力均相对于大气压进行测量。该装置具有一个带滚动开关的一体式液晶显示屏,可随时以四个为一组查看所有 32 个通道。
亚音速风洞 300 毫米 - Aidex
空气通过一个空气动力学设计的风管(锥体)进入隧道,该风管可线性加速空气。然后,空气进入工作区,穿过格栅,然后通过扩散器,最后进入变速轴流风扇。格栅可保护风扇免受松散物体的损坏。空气离开风扇,通过消音器,然后返回大气。

基于负载调制的IMD3取消毫米...
摘要 - 该字母提出了一种基于新型的基于载荷调制的3阶间调节失真(IMD3),以取消B类CMOS功率放大器(PAS)。在B类PA中,由3阶跨导率(G M 3)生成的IMD3和增益压缩的符号相反,因此,它们可以在特定的偏置和加载条件下相互取消。doherty拓扑允许通过调节整个负载调制区域的有效加载,促进IMD3取消来调节增益压缩。使用28 GHz 40 nm CMOS系列DOHERTY PA(DPA)拓扑验证所提出的方法。实验结果表明,与B类/DPA操作相比,10/17 dB IMD3的改进。无需使用任何数字前启动时,针对50 MHz 64-QAM OFDM信号的拟议技术的EVM具有8.9 dbm的平均输出功率为-38.7 dB(1.2%),比标准B/DPA的标准类B/DPA运行更好。

毫米波及亚毫米波的信息内容分析...
摘要 - 近年来,用于被动遥感的频率已扩展到毫米和亚毫米波区域。由于波长相对较短,在天线尺寸限制下可以实现较窄的光束宽度。反过来,可以实现更好的空间分辨率,这对于地静止轨道的传感器尤为重要。在地球静止轨道上有几项关于毫米和亚毫米波有效载荷的任务建议,例如,欧洲国家提出的微波大气音(GOMAS)的地球静态观测站,地球同步微波(GEM)Microwave(GEM)Sounder/Imager观察系统,美国下一代官员, 目前正在进行地进行地静止的微波有效载荷以及毫米和亚毫米波大气的仿真数据的可行性研究。 许多措施评估了大气发声数据的效率,其中之一是信号的自由度(DFS)。 它与特定回归算法无关,因此能够对性能比较和通道参数优化进行客观度量。 在本文中,分析了一组毫米波(50 〜70 GHz,118 GHz,183 GHz)和亚毫米波(380 GHz,425 GHz)的DFS。 给出了随着带宽增加的DFS改进;结果表明,更广泛的通道带宽将改善未来地静止轨道毫米和亚毫米波辐射仪的效率和检索性能。目前正在进行地进行地静止的微波有效载荷以及毫米和亚毫米波大气的仿真数据的可行性研究。许多措施评估了大气发声数据的效率,其中之一是信号的自由度(DFS)。它与特定回归算法无关,因此能够对性能比较和通道参数优化进行客观度量。在本文中,分析了一组毫米波(50 〜70 GHz,118 GHz,183 GHz)和亚毫米波(380 GHz,425 GHz)的DFS。给出了随着带宽增加的DFS改进;结果表明,更广泛的通道带宽将改善未来地静止轨道毫米和亚毫米波辐射仪的效率和检索性能。
毫米波长的星系尘埃发射
G. Ejlali 1、⇤、R. Adam 2、P. Ade 3、H. Ajeddig 4、P. André 4、E. Artis 5、H. Aussel 4、A. Beelen 6、A. Benoît 7、S. Berta 8、L. Bing、Orion、A. Bour 7、Cal. ano 5、I. de Looze 17、18、M. De Petris 10、F.-X. Désert 11、S. Doyle 3、EFC Driessen 8、M. Galametz 4、F. Galliano 4、A. Gomez 12、J. Goupy 7、AP Jones 6、A. Hughes 13、S. Katsioli 15,16、F. Kéru 5、C. Lamer 14、B. Lamer .、G. Lagache 9、S. Leclercq 8、J.-F.莱斯特拉德 19 ,J.-F. Macías-Pérez 5 , SC Madden 4 , A. Maury 4 , P. Mauskopf 3 , 20 , F. Mayet 5 , A. Monfardini 7 , M. Muñoz-Echeverría 5 , A. Nersesian 15 , 17 , L. Perotto 5 , G. Pino , V. Revéret 4 , AJ Rigby 3 , A. Ritacco 6 , 21 , C. Romero 22 , H. Roussel 23 , F. Ruppin 25 , K. Schuster 8 , S. Shu 26 , A. Sievers 14 , MWSL Smith 3 , Tabai FS , C. Xilo , 23 , 23 . p 15 , 和 R. Zylka 8
ALMA2:阿塔卡马大型毫米/亚毫米阵列探索宇宙和生命的起源
在日本,ALMA始于20世纪80年代初科学界自下而上的讨论:1983年提出了大型毫米波阵列(LMA)的设想。1987年,LMA的设想演变为大型毫米波和亚毫米波阵列(LMSA),并考虑了亚毫米波的观测。2001年,NAOJ、NSF和ESO签署决议,成立了ALMA。2004年,NAOJ正式加入ALMA建设,同年“阿塔卡马大型毫米波/亚毫米波阵列(ALMA)”得名。
30 毫米武器系统测试结果尚无定论
1992 年 1 月,100,000 发子弹的测试结果在统计上并不显著,因为达到的耐久性置信度较低。例如,在这个规模的测试中,只有 19% 的置信度表明 60,000 发子弹的组件将达到其最低预期寿命。据美国陆军装备研究、开发和工程中心(陆军的科学顾问)的一位代表称,19% 的置信度可能不适用于阿帕奇舰队中其他区域武器系统。研究中心的一名技术人员告诉 GAO,要获得有意义的测试结果,置信度至少应为 80%。 1988 年,研究中心提议进行 110 万发子弹耐久性测试,该测试将证明所有组件至少具有合格的置信度。阿帕奇计划的 Ace 代表表示,由于资金有限,并且进行更广泛的测试需要更长的时间,因此测试数量定为 10 万发。

Keysight 85033E 3.5 毫米校准套件
根据联邦采购条例 (“FAR”) 2.101 的定义,本软件为“商用计算机软件”。根据 FAR 12.212 和 27.405-3 以及国防部 FAR 补充文件 (“DFARS”) 227.7202,美国政府采购商用计算机软件的条款与软件通常向公众提供的条款相同。因此,Keysight 根据其标准商用许可向美国政府客户提供本软件,该许可体现在其最终用户许可协议 (EULA) 中,可在 http://www.keysight.com/find/sweula 找到该协议的副本。EULA 中规定的许可代表美国政府使用、修改、分发或披露本软件的专有权力。EULA 及其规定的许可不要求或允许 Keysight 进行以下行为:(1) 提供通常不向公众提供的与商业计算机软件或商业计算机软件文档相关的技术信息;或 (2) 放弃或以其他方式提供超出通常向公众提供的使用、修改、复制、发布、执行、显示或披露商业计算机软件或商业计算机软件文档的权利的政府权利。无其他政府要求

亚毫米级多材料陆地机器人
亚毫米尺寸的机器人用途广泛,可用作临床医学中微创外科手术的工具,也可用作生物研究中操纵细胞/组织的工具。然而,可用于此类机器人的结构和材料种类有限,这给实现所需的性能参数和操作模式带来了挑战。在这里,我们介绍了解决这些限制的制造和驱动方法,以实现具有复杂三维 (3D) 几何形状和异质材料结构的不受束缚的陆地机器人。制造过程利用受控机械屈曲来创建 3D 多材料结构,其布局范围从细丝阵列和折纸结构到仿生配置等。单向形状记忆合金相关的力与封装壳的弹性恢复力之间的平衡为这些结构的可逆变形提供了基础。运动和操控方式包括全球变暖时的弯曲、扭曲和伸展,以及激光诱导局部热驱动时的直线/曲线爬行、行走、转动和跳跃。光子结构(如反射器和比色传感材料)支持简单形式的无线监控和定位。材料、制造、驱动和传感方面的这些集体进步为这一新兴技术领域增添了越来越多的能力。