机构名称:
¥ 1.0
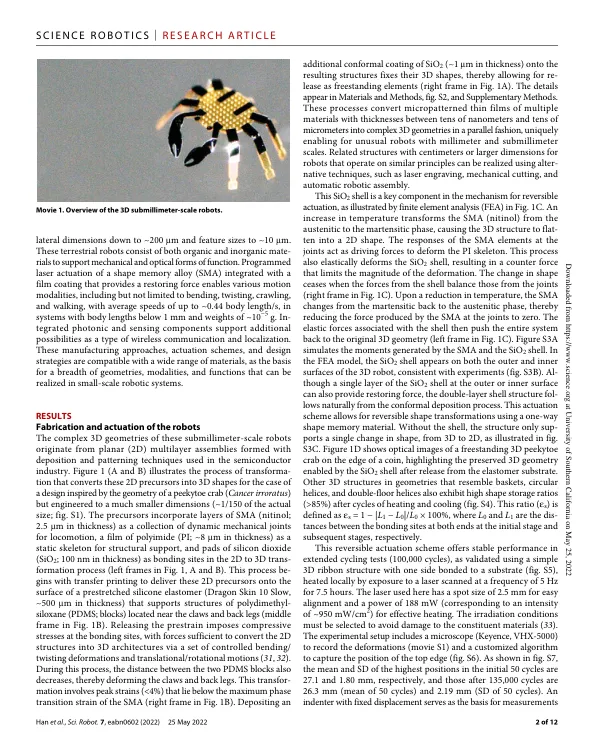
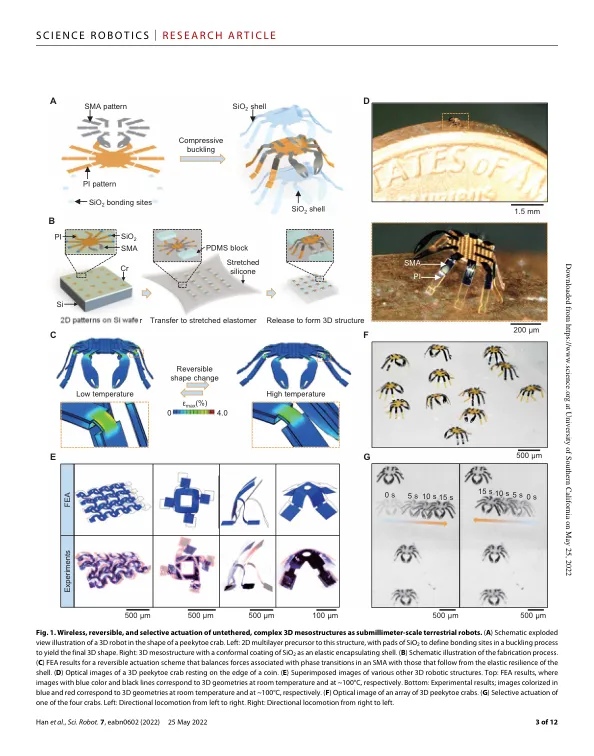
亚毫米尺寸的机器人用途广泛,可用作临床医学中微创外科手术的工具,也可用作生物研究中操纵细胞/组织的工具。然而,可用于此类机器人的结构和材料种类有限,这给实现所需的性能参数和操作模式带来了挑战。在这里,我们介绍了解决这些限制的制造和驱动方法,以实现具有复杂三维 (3D) 几何形状和异质材料结构的不受束缚的陆地机器人。制造过程利用受控机械屈曲来创建 3D 多材料结构,其布局范围从细丝阵列和折纸结构到仿生配置等。单向形状记忆合金相关的力与封装壳的弹性恢复力之间的平衡为这些结构的可逆变形提供了基础。运动和操控方式包括全球变暖时的弯曲、扭曲和伸展,以及激光诱导局部热驱动时的直线/曲线爬行、行走、转动和跳跃。光子结构(如反射器和比色传感材料)支持简单形式的无线监控和定位。材料、制造、驱动和传感方面的这些集体进步为这一新兴技术领域增添了越来越多的能力。
亚毫米级多材料陆地机器人
主要关键词



相关文件推荐