机构名称:
¥ 1.0
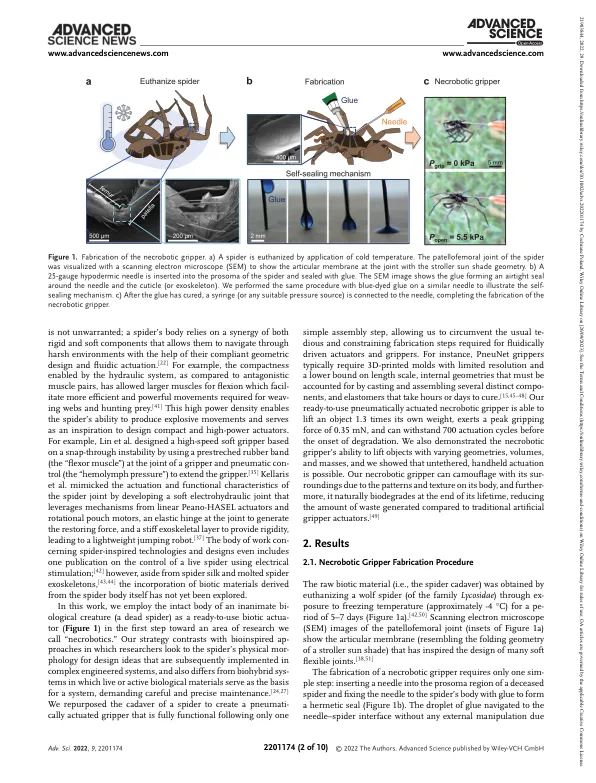
通过进化而完善的设计已为仿生动物机器人提供了灵感,它们可以模仿猎豹的运动和水母的柔顺性;生物混合机器人更进一步,将生物材料直接融入工程系统。仿生和生物混合带来了新的、令人兴奋的研究,但人类一直依赖生物材料——来自生物体的非生物材料——因为他们的早期祖先穿着动物皮作为衣服,用骨头作为工具。在这项工作中,一只无生命的蜘蛛被重新用作一个随时可用的执行器,只需一个简单的制造步骤,开创了“死机器人”领域,其中生物材料被用作机器人组件。蜘蛛独特的行走机制——依靠液压而不是拮抗肌对来伸展腿部——产生了一个死机器人夹持器,它自然处于闭合状态,可以通过施加压力打开。死灵机器人抓手能够抓取不规则几何形状的物体,抓取重量可达自身重量的 130%。此外,抓手可用作手持设备,并可在户外环境中伪装。死灵机器人可进一步扩展,以整合来自其他生物的生物材料,这些生物具有类似的液压机制,可用于运动和关节活动。
神经机器人:生物材料作为即用型执行器
主要关键词



相关文件推荐