XiaoMi-AI文件搜索系统
World File Search System动臂

评估太阳能遥控动臂喷雾器的电池性能
Pharma Innovation Journal 2023; SP-12(12):1689-1694 ISSN(E):2277-7695 ISSN(P):2349-8242 NAAS评级:5.23 TPI 2023; SP-12(12):1689-1694©2023 TPI www.thepharmajournal.com接收到:接受:19-10-2023接受:25-11-2023 MV JALU农业机械和动力工程系 Engineering and Technology, JAU, Junagadh, Gujarat, India PS Ambaliya Department of Farm Machinery and Power Engineering, Collage of Agricultural Engineering and Technology, JAU, Junagadh, Gujarat, India DB Chavda Department of Farm Machinery and Power Engineering, Collage of Agricultural Engineering and Technology, JAU, Junagadh, Gujarat, India Corresponding Author: MV Jalu Department of农业机械和动力工程,农业工程和技术的拼贴,Jau,Junagadh,Gujarat,India


伸缩臂 - 65-J
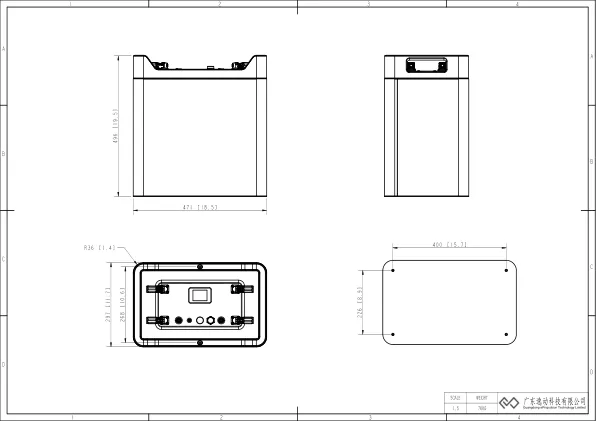
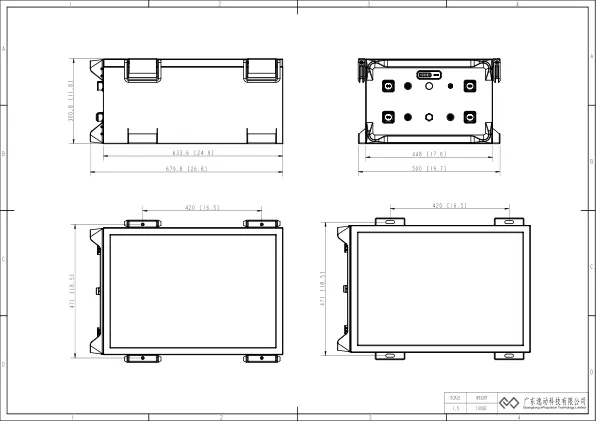
高度 工作高度* 平台高度 行驶高度 最大伸展 转盘摆动 副臂运动范围 平台旋转 平台尺寸和容量 总起重能力 人员容量 平台宽度 平台深度 平台入口尺寸 收藏长度(整体) 宽度 整体高度 尾摆 重量**(大约) 工作条件 行驶 爬坡能力 离地间隙 突破角 车轴振动 轮胎 功率 动力源 燃油容量 液压油容量 运动 转弯半径(内部) 行驶速度 动臂提升速度 动臂伸展速度 副臂提升速度

用单臂3- ...
摘要:这项工作提出了配备了单臂3度的机器人操纵器的无人机的设计和开发,旨在增强无人机(无人机)的多功能性和功能。机器人臂的整合将无人机的功能扩展到传统的空中监视之外,从而使其能够在各个行业和社会领域执行复杂的操纵任务。该项目涵盖了几个关键阶段,包括使用SOLIDWORKS设计机器人臂和与PLA材料的3D打印,使用ROS2 Humble实施控制算法,以及与飞行控制器板集成以进行无缝操作。通过一种全面的方法,该项目旨在通过附加的操纵器实现无人机的最佳设计,精确控制和有效的操作。这项研究的结果与行业,社会和学术机构具有很大的相关性,这有助于机器人和无人系统的技术创新,社会影响以及进步。关键字:无人机;机器人; 3dof;操纵器;臂
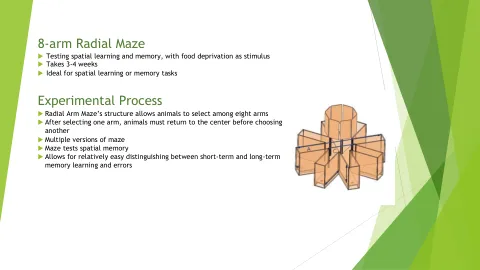
8臂自由基迷宫
在适当大小的支架和腔室中的响应传感器平台中。惊吓的神经生物学。Koch M.,Prog Neurobiol。 1999年10月; 59(2):107-28-惊吓调制的翻译价值。 Fendt M,Koch M.,细胞组织Res。 2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。 Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Koch M.,Prog Neurobiol。1999年10月; 59(2):107-28-惊吓调制的翻译价值。Fendt M,Koch M.,细胞组织Res。 2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。 Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Fendt M,Koch M.,细胞组织Res。2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Fendt M,Li L,Yeomans JS。心理药理学(Berl)。2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。Yeomans JS,弗兰克兰PW。大脑res res res rev.1995年11月; 21(3):301-14

双横臂悬架上控制臂材料优化
将总重量减轻 10-12%。 通过材料比较优化上控制臂。 降低零部件成本并提高车辆性能。 3. 力的计算 A. 静态条件 地球引力 W=mg 通过重心作用。它作用于轮胎和道路之间的接触面。为假设作用于车辆的边界条件,考虑了 SUV 的上控制臂。该 SUV 来自 TATA Motors,型号为 Safari。令 R 1 为前轴重量,R 2 为后轴重量。重量必须分为前轴重量和后轴重量。前轴占总重量的 52%,后轴占总重量的 48%。车辆总重量 = 2650 kg = 25987.6 N 因此,前轴重量 = 1378 kg = 13513.5 N 一个车轮的反作用力 = 1378/2 = 689 kg = 6756.8 N 因此,后轴重量 = 1272 kg = 12474.05 N