XiaoMi-AI文件搜索系统
World File Search System勘察


了解异地施工的新兴技术
· 异地建造房屋具有诸多优势,包括成本效益高、施工时间短,以及建造节能住宅、节省时间和材料、减少建筑排放和提供就业机会。· 建筑信息模型 (BIM) 有助于实现精确的 3D 可视化,增强协作和协调,最大限度地减少错误,并优化异地施工的工作流程。· 机器人集成(包括 3D 打印和六轴机器人)改变了制造流程,实现了快速制造和精确组装,同时降低了安全风险。· 无人机通过现场勘察、质量控制检查和 3D 建模提高了效率和安全性。虚拟现实提高了利益相关者的参与度、设计可视化和决策能力,从而节省了时间和成本。

月球挥发物和矿物测绘轨道器(VMMO)
挥发物和矿物学测绘轨道器 (VMMO) 是一个低成本的 12U 立方体卫星概念,最初由欧洲航天局 (ESA) 选为 2018 年 SysNova 挑战赛的两个获胜者之一。VMMO 航天器将使用月球挥发物和矿物学测绘仪 (LVMM) 多波化学激光雷达有效载荷对月球南极永久阴影区域进行挥发物和矿物学勘察,以探测和绘制挥发物和其他资源如钛铁矿 (FeTiO 3 ) 的地图,地面采样距离 (GSD) 约为 100 米。开发宝贵的月球资源,如水冰和其他挥发物,对于未来载人月球基地的可持续性至关重要。尽管之前的月球任务已经在月球两极周围探测到并绘制了水冰地图,但对于月球风化层内挥发物含量的精确分布仍然存在很大的不确定性。未来计划执行多项任务
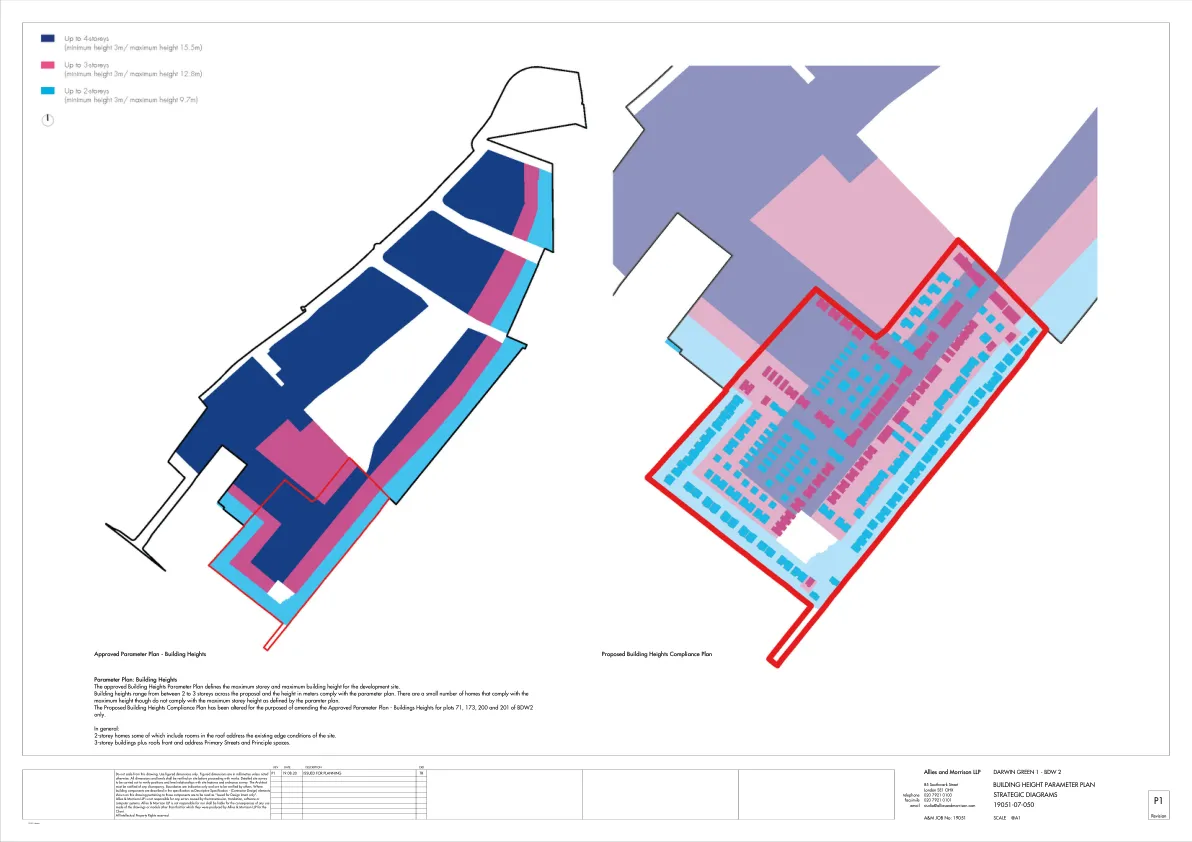
参数规划:建筑高度
请勿按比例绘制此图纸。仅使用图形尺寸。除非另有说明,图形尺寸以毫米为单位。在继续施工之前,应在现场验证所有尺寸和水平。应进行详细的现场勘察,以验证与现场特征和地形测量的位置和水平关系。如有任何差异,必须通知建筑师。边界仅供参考,应由其他人验证。如果规范中将建筑组件描述为描述性规范 - (承包商设计)本图纸上显示的与这些组件有关的元素应理解为“仅为设计意图而发布”。Allies & Morrison LLP 对传输、翻译、软件或计算机系统造成的任何错误概不负责。Allies & Morrison LLP 对因将图纸或模型用于除 Allies & Morrison LLP 为客户制作的用途以外的任何用途而造成的后果概不负责,也不承担任何责任。保留所有知识产权 P1
![arXiv:1810.02455v2 [cs.RO] 2019 年 3 月 1 日](/simg/7\763a8b44196a9bef96a30b09810486f99c1f2ff0.webp)
arXiv:1810.02455v2 [cs.RO] 2019 年 3 月 1 日
摘要 — 小型无人机可以通过实时监视不断蔓延的火势,帮助消防员扑灭野火。然而,仅根据野火图像自主引导无人机是一个具有挑战性的问题。这项工作对机载摄像机获得的噪声图像进行建模,并提出了两种过滤野火图像的方法。第一种方法使用简单的卡尔曼滤波器来降低噪声并更新观察区域的信念图。第二种方法使用粒子滤波器来预测野火的增长,并使用观测来估计与野火扩张有关的不确定性。信念图用于训练深度强化学习控制器,该控制器学习一种策略来引导飞机勘察野火,同时避免直接飞过火场。仿真结果表明,所提出的控制器可以精确引导飞机并准确估计野火的增长,而对观测噪声的研究证明了粒子滤波方法的鲁棒性。
guideio - Arnprior & McNab/Braeside 档案
伦弗鲁南区省议员 Paul J Yakabuski 上周宣布将重建从伯恩斯敦到卡拉博吉的 508 号高速公路。第一批工程勘察队于周一开始工作。Yakabuski 先生上周四会见了里夫。R KniRht 先生。以及对重建 508 号公路有着浓厚兴趣的 Hagot 和 Blythfield 镇议会。东部地区主管 R Billing 先生和交通运输和通信部 J Irving 先生出席了会议,向 Reeve 和议会成员概述了新公路的拟议路线和其他细节。Yakabuski 先生表示,多年来,许多来自 Calabogie 地区的公民和游客都曾就这条公路问题与他联系。虽然他们想要一条新公路,但他们也希望尽可能保留公路的许多风景。尽管设计和建造一条好的道路并保留风景很困难,但我们会尽可能做到这一点。Yakabuski 先生表示,设计部门的人员特别关注这一点
招标邀请 - NTPC 招标
1. 太阳能光伏电站的设计、工程、制造、供应、包装和转运、运输、卸货、存储、安装、测试和调试,但不包括太阳能光伏组件的供应(光伏组件应由 NTPC REL 作为免费发放物品提供)。 2. 太阳能光伏组件的接收、现场卸货、存储、安装、测试和调试。 3. 现场 - 平整和清除植被(如需要)、地形勘测(可选)、岩土勘察(可选)。 4. 设计和建造地基以及安装组件安装结构 (MMS),采用基于跟踪器的技术,用于直流:交流比为 1.30 的 SPV 面板,包括将光伏组件固定在跟踪器上以及光伏组件互连。但是,直至逆变器的电气直流系统的设计/工程、采购和安装应考虑直流:交流比为 1.35。 5. 安排施工所需的电力和供水。

P&T 新闻简报 2016 - 创造
地雷和埋藏的简易爆炸装置对现代冲突地区的美国作战人员来说是一个真实而持续的威胁。这些威胁在战斗平息后仍会持续数十年,每年造成数千名平民(通常是儿童)死亡或致残。从空中安全远程探测埋藏的威胁可以减少军人和平民的伤亡,同时提高部队的机动性。耦合声光技术在探测和辨别埋藏目标方面很有前景:声波震动地面并激发埋藏地雷的响应,这些响应可以用扫描激光测振仪检测到。海军有意将该系统安装在无人直升机上,以便快速部署、快速勘察,并确保参与的士兵几乎完全安全。Creare 正在开发一种紧凑型机载声学发射器 (CAAT) - 一种轻便高效的声源 - 以产生高强度、低频声波,足以从离地面 2,000 英尺的高度震动地面。我们的第一代原型机在尺寸、重量、功率等方面达到或超过了海军的规格要求,
A 部分 DATOS PERSONALES Nombre KARIM ...
B 部分简历简历(最多 5,000 个字符,包括空格) Benabdellah 博士的简历简历 • 科学贡献:La carrera del Dr. Benabdellah se destaca por 53 publicaciones en revistas indexadas en JCR desde 1994 hasta 2023, donde 24 de las Mismas han sido publicadas en los últimos cinco años (2018-2023);包含 9 篇入门文章 decil (D1) 和 48 篇入门文章 cuartil (Q1),了解 alta calidad 和 elimpigación 的影响。这本书是作者通讯的 23 篇文章的入门读物,表明了我们正在研究的问题。 Además,su índice He es 21,共 1430 个,参见 Web of Science。该研究的进展对近年来的重大进展具有重大意义,是微生物学分子研究的基础,是基因学和基因学领域的先驱,一直以来都是基因学领域的研究热点。 • 对社会的贡献:Benabdellah 博士记录了其实践成果和有形专利以及技术转让合同的调查结果。企业的共同基金:Lentistem SL 和 EBT-UGR EVOSTem Theranostic SL,是一项为激活许可证中的创新实践应用而贡献的努力。我们与 Fase I-II 诊所开展合作,实现了科尔多瓦索非亚王后大学医院 (HURS) 血液学联合诊所的指导。 • 对青年调查者的形成的贡献:Benabdellah 博士对调查者的形成至关重要。拥有 6 名博士导师,他们为 CAR-T 基因教育的应用提供了辩护和中心,其他方面。他是 14 名大师和学生的导师,他们为国际学术界的活动做出了贡献,并在国家和国际研究中心实现了研究。最近,我们组织了各种国际会议,在卡塔尔多哈和卢布尔雅那(斯洛文尼亚)举办了“基因组编辑:基础学习和高级技术”活动。 • 调查活动:Benabdellah 博士参与了 7 个国家和地区项目的活动(和实际参与),并担任 4 个项目的主要调查者,以实现 liderazgo 的能力。此外,还有平台和调查的详细信息,包括 Grupo PAIDI 和红色西班牙 RICORs-TERAV、红色 Rantecar 和红色 COST Action CorEuStem,反映了调查合作的妥协。 • 勘察:Benabdellah han 博士对 R3 认证的勘察贡献,对西班牙科学、技术和创新系统的建立进行了调查。该证书是对独立调查和上级调查的能力和妥协的证明,旨在帮助欧洲实现调查的目的。 Además, fue galardonado con el premio en la categoría de Innovación Tecnológica por Roche en 2021. • Colaboraciones Internacionales y Liderazgo: Desde 2022, el Dr. Benabdellah ha asumido el rol de coordinador e investigadorprinciple de laprima red europea COST-EU coordinada西班牙将在 2020 年为 Horizonte 提供 700,000 欧元的融资。该项目是基因编辑应用程序的独家中心,提供多种服务,包括 25 项投资和 350 名调查员/as,以及多家企业代表。 La red comprende 8 group de trabajo, cada uno literado por los Expertos más prestigiosos de Europa (www.genehumdi.eu)。与此同时,Benabdellah 博士提出了妥协方案,以促进国际合作和基因编辑领域的进步。 • 概要:贝纳卜德拉博士在不同领域发表了著名的演讲,包括科学公共、专利和企业研究实践、青年研究者的形成和指导;为创新贡献进行研究和勘察的项目。
马萨诸塞州联邦调查手册...
测量手册 1 目录 页码 第一部分 一般信息 9 1.1 公共关系和测量员的责任 9 1.2 进入房产的权利 9 1.3 长度单位 10 1.4 水平和垂直基准 11 1.5 安全 11 1.5.1 人身安全 12 1.5.2 道路安全 12 第二部分 测量信息 13 2.1 控制测量 13 2.1.1 顾问测量 13 2.1.2 水平控制 14 2.1.3 水平精度顺序 14 2.1.4 角度测量 15 2.1.5 距离测量 16 2.1.5(A) 贴胶带16 2.1.5(A)1 对准 16 2.1.5(A)2 张力 16 2.1.5(A)3 支撑 16 2.1.5(A)4 等级 17 2.1.5(A)5 温度 17 2.1.5(A)6 胶带校正 17 2.1.5(B) 胶带技术 17 2.1.6 水平控制测量方法 17 2.1.6(A) 勘察 17 2.1.6(B) 纪念碑 18 2.1.6(C) 现场检查 18 2.1.7 垂直控制 19 2.1.8 垂直精度顺序 19 2.1.9 垂直控制方法 19