XiaoMi-AI文件搜索系统
World File Search System单频

四频散射对碳纳米管中热传输的影响
迄今为止,对碳纳米管的热运输物理学的理解仍然是一个开放的研究问题[1-10]。Experimentally, on the one hand, the thermal transport in single-wall carbon nanotubes (SWCNTs) is measured to be nondiffusive with divergence of thermal conductivity ( κ ) for tube lengths of up to 1 mm [ 6 , 8 ], as suggested by the Fermi, Pasta, Ulam (FPU), and Tsingou model [ 11 ], on the other hand, the κ is recently reported to converge for因此,管长的长度仅为10μm[12],突显了SWCNT的实验测量和热传输结果的解释[13]。基于声子散射选择规则的早期理论研究表明,长波长膨胀声音和扭曲 /旋转 /旋转 /旋转声音声子模式(统称为横向模式,以下是以下是横向模式)的非散射。这是通过使用Boltzmann转运方程(BTE)的迭代溶液获得的数值依赖性的声子特性的确定确定的,在这些迭代溶液中,在没有拼音子散射的情况下发现κ在差异[7]。但是,这些理论预测和数值依赖性的声子的性质是通过仅考虑三个子过程而获得的,并且尚不清楚当高级四阶四个频率过程中考虑到[7,9]时,长波长横向声子是否保持不变。基于分子动力学模拟的其他计算方法自然可以将声子非谐度包括到最高级。但是,由于几个然而,对于具有平衡分子动力学的SWCNT,这些模拟仍然是不合理的[5,15],并且直接的分子染料表明κ的长度依赖性至少为10μm[4,16]。随着计算资源的最新进展,现在有可能通过基于BTE的方法在声子传输属性的预测中包括高阶四声音程序[17-21]。

集成传感器的低功率,敏捷电频梳光谱仪
基于光子集成电路的传感平台已显示出巨大的希望,但是它们需要集成的光学读数技术中的相应进步。在这里,我们提出了一个片上光谱仪,该光谱仪利用了综合的薄膜Niobate调制器来产生频率 - 敏捷的电频率梳子,以询问芯片尺度温度和加速传感器。chir梳过程允许超速射频驱动电压,该电压比文献中最低的少数数量较少七个数量级,并且是使用芯片尺度,微控制器驱动的直接数字合成器生成的。片上梳状光谱仪能够同时询问片上温度传感器和芯片外部,微型制动的光力加速度计,其尖端敏感性分别为5 µk·Hz -1/2和≈130µm·S -2·s -2·hz-hz -1/2。该平台与广泛的现有光子集成电路技术兼容,在该技术中,其频率敏捷性和超低射频功率要求的组合预计有望在量子科学和光学计算等领域中应用。光子集成电路(PIC)技术具有低成本,高精度的野外传播感应的巨大潜力。但是,解锁这些功能不仅需要传感器,而且还需要光学读数的整合。[2,3]这些类型的测量通常需要在MHz水平上狭窄的梳齿间距,并在GHz水平上梳子跨度,从而导致敏感且高动态范围读数。芯片尺度的光学频率梳子非常适合这些光子读数需求,因为它们具有高速,多路复用测量的能力而无需任何运动部件,[1]因此允许将光子传感器转移到数字输出。尤其是,电频率梳子不仅可以集成,而且还可以具有足够的频率敏捷性来实现探测原子过渡所需的高分辨率以及基于光学(和光力学的)腔传感器,其中需要对腔运动进行测量以读取传感器。
lra-d1000插件频闪无线门铃套件由保障供应
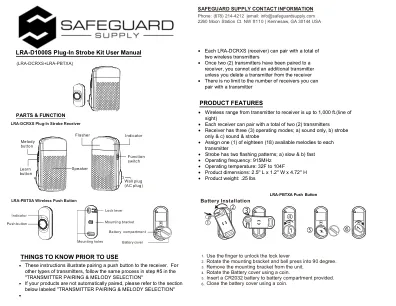
FCC语句:根据FCC规则的第15部分,已经对该设备进行了测试并符合B类数字设备的限制。这些限制旨在提供合理的保护,以防止住宅安装中有害干扰。此设备会生成,用途并可以辐射射频能量,如果未按照说明进行安装和使用,可能会对无线电通信产生有害的干扰。但是,不能保证在特定安装中不会发生干扰。如果此设备确实会对广播或电视接收造成有害干扰,这可以通过打开设备和开机来确定,则鼓励用户尝试通过以下一项或多项措施来纠正干扰:

紧凑型 VHF 发射器,功率为 100 W 至 2.5 kW
可通过两个额外的模拟信号输入输入 RDS 或 SCA 信号。当然,还提供了用于同步外部 RDS 编码器的导频音输出。接口包括用于模拟左/右、AES/EBU、MPX 的 XLR 以及用于其他信号的 BNC。对于未来的应用(例如在单频网络中运行),发射器可以同步到外部频率参考(10 MHz)或时间参考(1 pps)。

16 bit 模数转换器TM7706 - NET
注释: 1.B 级温度范围为 -40 ℃ ~+85 ℃。 2.这些数据是按最初设计的产品发布的。 3.一次校准实际上是一次转换,因此这些误差就是表 1 和表 3 所示转换噪声的阶数。这 适用于在期望的温度下校准后。 4.任何温度条件下的重新校准将会除去这些漂移误差。 5.正满标度误差包括零标度误差 ( Zero-Scale Error )(单极性偏移误差或双极性零误 差),且既适用于单极性输入范围又适用于双极性输入范围。 6.满标度漂移包括零标度漂移 (单极性偏移漂移或双极性零漂移)且适用于单极性及 双极性输入范围。 7.增益误差不包括零标度误差,它被计算为满标度误差——对单极性范围为单极性偏移 误差,而对双极性范围为满标度误差——双极性零误差。 8.增益误差漂移不包括单极性偏移漂移和单极性零漂移。当只完成了零标度校准时,增 益误差实际上是器件的漂移量。 9.共模电压范围:模拟输入电压不超过 V DD +30mV ,不低于 GND-30mV 。电压低于 GND-200mV 时,器件功能有效,但在高温时漏电流将增加。 10.这里给出的 AIN ( + )端的模拟输入电压范围,对 TM7706 而言是指 COMMON 输入 端。输入模拟电压不应超过 V DD +30mV, 不应低于 GND-30mV 。 GND-200mV 的输入 电压也可采用,但高温时漏电流将增加。 11.VREF=REF IN ( + )- REF IN ( - )。 12.只有当加载一个 CMOS 负载时,这些逻辑输出电平才适用于 MCLK OUT 。 13.+25 ℃时测试样品,以保证一致性。 14.校准后,如果模拟输入超过正满标度 , 转换器将输出全 1, 如果模拟输入低于负满标度, 将输出全 0 。 15.在模拟输入端所加校准电压的极限不应超过 V DD +30mV 或负于 GND - 30mV 。 16.当用晶体或陶瓷谐振器作为器件的时钟源时 (通过 MCLK 引脚 ), V DD 电流和功耗 随晶体和谐振器的类型而变化 (见“时钟和振荡器电路”部分)。 17.在等待模式下,外部的主时钟继续运行, 5V 电压时等待电流增加到 150 μ A , 3V 电 压时增加到 75 μ A 。当用晶体或陶瓷谐振器作为器件的时钟源时,内部振荡器在等待 模式下继续运行,电源电流功耗随晶体和谐振器的类型而变化 (参看“等待模式” 一节)。 18.在直流状态测量,适用于选定的通频带。 50Hz 时, PSRR 超过 120dB (滤波器陷波 为 25Hz 或 50Hz )。 60Hz 时, PSRR 超过 120dB (滤波器陷波为 20Hz 或 60Hz )。 19.PSRR 由增益和 V DD 决定,如下:

多基地声纳性能建模 - NTNU
持续时间较短(通常为 0.1 – 2.0 秒)。由于多普勒效应,移动目标将返回频移回波。因此,尽管有来自岩石和海山等其他反射体的不必要混响,仍可检测到目标。我们可以定义多普勒速度,如图 4 所示。相对频移等于多普勒速度除以声速。图 5 显示了在固定源/接收器对附近不同位置以 45 度方向移动的目标的多普勒速度。左侧和中间的图分别显示了单基地和双基地的情况。右侧的图显示了双基地设置的多普勒比单基地设置的多普勒更高的目标区域。黄色代表超过 2 kts,橙色代表 4 kts。虽然包括双基地接收的好处不是很大,但它可能对区分慢速移动目标和回波与静态地层很重要。
电子膨胀阀开度对恒温恒湿箱系统性能的影响
EEV) 具 有流量调节范围大 、 反应迅速 、 控制精确等特点 [9] , 在定频机组中的应用愈发受到关注 [10] 。 郝文洋 等 [11] 利用电子膨胀阀代替毛细管作为恒温恒湿箱的 节流装置进行实验研究 , 发现改进后箱体温湿度控制

具有单光子精度的可调谐单分子发光二极管
量子点发光二极管(QD-LED)是日常生活中使用的显示设备的例子。作为设备中使用的最新一代发光二极管(LED),量子点发光二极管(QD-LED)具有色域纯正(即颜色可通过尺寸调谐,半峰全宽(FWHM)约为几十纳米)[9]、与高清屏幕、虚拟/增强现实集成度高[4]、量子效率高、发射明亮[9]等特点,具有很好的应用潜力。自然而然,分子作为基本量子体系,启发人们只用一个分子来构造LED的概念,即单分子发光二极管(SM-LED)。它具有更高的原子经济性和集成度、通过精确有机合成可调的色纯度、可控的能带排列、避免分子间荧光猝灭等特点。[9]事实上,我们看到的物理世界就是由分子构成。因此,用单个分子作为显示像素最能体现现实世界,这也是显示器件的终极目标。然而,分子水平上的器件工程一直不是一项简单的任务。这种工程的典型例子是硅基微电子器件的小型化和摩尔定律的延续。[10]为此,通过自下而上的途径制备多功能分子器件是一种很有前途的策略。[11,12]受由单个D–σ–A分子组成的整流器的初始理论提议的推动[13],各种功能性单分子器件,如场效应晶体管[14,15]、整流器[16,17]、开关[18,19]和忆阻器[20],已通过长期优化功能分子中心、电极材料和界面耦合而不断改进。[11,12,21]

使用单束...
摘要 - 在Wobot机器人的定位中,由于电磁波衰减或由于水浊度而导致的光相机,它不能依靠传感器(例如GPS)。声纳对这些问题免疫,因此尽管空间和时间分辨率较低,它们仍被用作水下导航的替代方案。单光声声纳是传感器,其主要输出为距离。与Kalman滤波器(例如Kalman滤波器)结合使用时,这些距离读数可以纠正通过惯性测量单元获得的本地化数据。与多光束成像声纳相比,单光束声纳廉价地集成到水下机器人中。因此,本研究旨在开发使用单光声声和基于压力的深度传感器的低成本定位解决方案,以纠正使用卡尔曼过滤器的静止折线线性定位数据。从实验中,每个自由度的单束声纳能够纠正本地化数据,而无需复杂的数据融合方法。索引术语 - Kalman过滤器,本地化,声纳,内部机器人