XiaoMi-AI文件搜索系统
World File Search System可折叠的

RF-3082-AT001 MUOS可折叠的天线
L3HARRIS RF-3082-AT001下一代交叉的Yagi卫星天线提供完整的双链MUOS和Legacy UHF SATCOM。为快速部署和高增益辐射模式而设计,天线覆盖了240至380 MHz频率范围。它可以折叠起来,并轻松适合轻巧的小体积随身携带袋。

单晶可折叠的太阳能行李箱,带有Voyager
具有易于使用和插入式设计的设计,该手提箱专为空间和重量限制的移动离网应用程序而设计。手提箱支持12V或24V深循环凝胶密封的铅酸电池(凝胶),洪水含量酸的电池(FLD),密封的铅酸电池(SLD/AGM)或磷酸铁磷酸锂电池(LI)。


3D打印的多腔软执行器具有集成运动和传感功能,并通过生物启发的交织可折叠的内分体
人类的肌肉束具有同步神经感觉的多功能运动,使人可以执行复杂的任务,这激发了对机器人动作和感知机器人的功能整合的研究。尽管使用固有的依从性,软动力器已经开发了多种运动能力,但同时使用的方法通常涉及添加感应组件或嵌入某些信号的底层基质,从而导致结构复杂性和具有高度变化的部分的驱动部分之间的结构复杂性和差异。受到肌肉束多纤维机制的启发,提出了一种多腔功能整合(MCFI)方法,用于软气动执行器,以同时实现多维运动并通过分离和协调主动和被动腔来感知。引入了一个由生物启发的交织可折叠内体(Bife),以使用优化的目的可折叠性来构建和加强多腔室,从而实现3D打印单物质制造。执行伸长,收缩和双向弯曲,以基于基于多腔压力的运动学和感应模型感知其空间位置,方向和轴向力。建立了两个MCFI-ACTUATOR驱动的机器人:一个具有路径重建的软爬行机器人,具有对象外部感受的狭窄节流柔软的握把,验证了执行执行器的实用性以及对MCFI方法的智能软机器人创新的潜在的潜力。

儿童发展发展赠款2025
树篱装饰等等将不会资助(有关更多详细信息,请参见常见问题文件)。4个玩具和书籍在开发和文化上适当的玩具和书籍;骑玩具;构建块;图书;打扮teddys/娃娃/小雕像;音乐;富有想象力的游戏;拼图;棋盘游戏;手工艺品材料和用品等5托儿和安全设备:婴儿车;越野车汽车座椅/助推器座椅;婴儿床,床垫和亚麻,包括可折叠的婴儿床(有关更多详细信息,请参见常见问题解答);高脚椅和助推器座椅;阶梯;火毯;灭火器;烟雾报警器;一氧化碳警报;室内存储;橱柜锁;急救套件;盲线安全夹;等。5托儿和安全设备:婴儿车;越野车汽车座椅/助推器座椅;婴儿床,床垫和亚麻,包括可折叠的婴儿床(有关更多详细信息,请参见常见问题解答);高脚椅和助推器座椅;阶梯;火毯;灭火器;烟雾报警器;一氧化碳警报;室内存储;橱柜锁;急救套件;盲线安全夹;等。
PEO简介的构件图表
储水分配系统(WSD)•陆军主要的大型饮用水袋农场存储,将存储容量增加到100,000加仑。•能够支持拆分操作和多个配置。•由可折叠的储罐,发动机驱动的离心水泵,仪表,软管,配件和喷嘴以及自动将水有量氯于陆军标准的氯化单元组成。•容量:100,000加仑的存储。125加仑每分钟泵,每分钟350加仑的泵,软管,端连接器。
poly(乙烯基氟化物)/cu@ni锚定降低 -
nbslcnls Poly(vinylidene fluoride)/Cu@Ni Anchored Reduced-Graphene Oxide Composite Films with Folding Movement to Boost Microwave Absorption Properties Biao Zhao, 1, 2,# Luyang Liang, 3,# Zhongyi Bai, 1 Xiaoqin Guo, 1 Rui Zhang, 1, 3 Qinglong Jiang 4,* and Zhanhu Guo 5,*摘要详细研究了详细研究了详细研究了详细研究了详细研究了详细研究了详细研究了详细研究了聚(vinylidene氟化物)/rgo/cu@ni复合膜的氧化石墨烯(RGO)/cu@ni加载和可折叠结构的影响。PVDF/RGO/CU@Ni复合膜的微波吸收特性随RGO/CU@ni含量增加而增加,然后降低,这是由于阻抗匹配的变化所致。此外,发现可折叠结构在可调和强大的微波吸收中起决定性作用。对于可折叠的PVDF/20 wt%rgo/cu@ni,厚度为2.5毫米,可以获得-49.1 dB的最小反射损失,并且带宽(低于-20 dB,99%的耗散)可以达到6.4 GHz(18.5-19.3 ghz,20.7-26.7-26.5 ghz)。
Marzano的高收益教学策略
隐藏的面板可折叠的学生可以在正面放置练习问题,问题或图表,并将答案键隐藏在隐藏面板内!第一步 - 取一件8.5 x 11的卡片纸。折叠成十二个正方形。步骤二 - 切成8.5 x 11 cardstock步骤的1/2页的两列条剪切三分 - 将8.5 x 11的卡片纸折成两半。如图所示,在折叠侧进行了2个切割。第四步 - 将条纹编织成大纸的缝隙。第五步 - 隐藏面板将显示在反向侧。将纸弯曲成形成W.折叠后背面的中心拆分中的隐藏面板。学生可以将任何练习问题或图表放在前面,并在隐藏面板内回答。在阅读策略中:“大声思考”
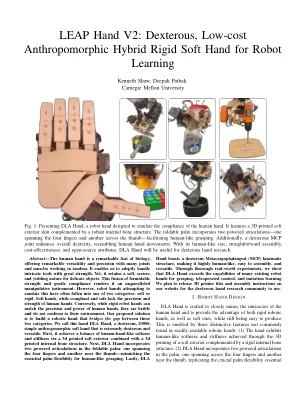
Leap Hand V2:灵巧,低成本的拟人化杂交刚性刚性软手,用于机器人学习
摘要 - 人类的手是生物学的非凡壮举,具有许多关节和肌肉的同时,具有出色的多功能性和精度。它使我们能够以极大的力量处理复杂的工具。然而,它保留了柔软,安全且屈服于精致物体的性质。强大的强度和柔和的合规性融合使其成为无与伦比的操纵仪器。但是,试图模拟这一点的机器人之手通常属于两个类别之一:软或刚性。柔软的手,虽然符合性和安全性缺乏人类手的精度和力量。相反,虽然刚性机器人的手可以与人体的精确性和力量相匹配,但它们是脆弱的,不符合其环境。我们提出的解决方案是建立一个机器人手,弥合这两个类别之间的差距。我们称此手DLA手,一种灵巧的,$ 3000,简单的拟人化软手,非常灵巧且多才多艺。首先,它通过3D打印的软外部与3D打印的内部骨结构相结合,达到了人体手状的柔软度和刚度的平衡。接下来,DLA手在可折叠的棕榈中结合了两个动力的表达:一个横跨四个手指,另一只手指靠近拇指,模仿了类似人类的握把的基本棕榈灵活性。最后,DLA