XiaoMi-AI文件搜索系统
World File Search System可查
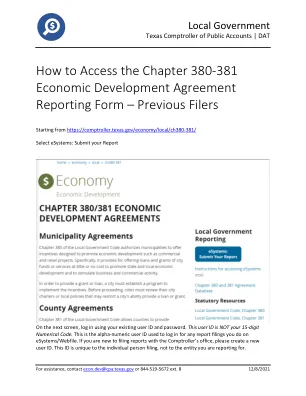
先前申报者 - 德克萨斯州审计长
• 添加新协议:选择此选项可提交尚未提交到数据库的协议。 • 修改协议:选择此选项可提交对先前提交的协议的修改。 • 续订协议:对于已到期且续订且除到期日期外条款和条件没有变化的协议,请选择此选项。 • 替换协议提交:选择此选项可替换提交时有错误或存在错误的协议。 • 查看已上传的协议:选择此选项可查看您当地政府先前提交的协议或取消协议
皇家植物园(邱园)的经济价值
出于本报告的目的,所有成本和收益均以 2018/19 年度(有数据可查的最近一年)为基准进行量化。我们首先估算邱园对英国居民游客的价值;然后对韦克赫斯特和两个花园的特别活动重复这一过程。后续章节评估了邱园对国内学生的教育贡献;其科学影响(就其对英国长期生产力的提升而言);其非使用价值;以及其国际价值。最后,第 10 章将这些价值链汇总在一起,并将它们与运营和维护邱园的成本进行比较,以得出“效益成本比”。这个比率让我们了解了邱园的整体性价比。
牛津经济学巴布科克对英国的贡献......
Babcock 通过努力提高机会平等来实现社会价值。该公司为其高级领导团队设定了女性参与目标,这一目标在 2020 年至 2021 年(有数据可查的最近一年)期间有所提高。自 2017 年以来,该公司的平均性别薪酬差距一直低于英国平均水平,2021 年这一差距进一步缩小。该公司拥有多个内部网络和计划,旨在促进整个员工队伍的机会平等和福祉。例如,Babcock 推出了面向 LGBTQ+ 员工的网络 Pride in Babcock;通过其神经多样性网络支持神经多样性员工;并实施慈善和赞助政策,为社区活动提供时间和资源。Babcock 还为武装部队成员实施了支持性招聘政策。

推进创意经济的衡量
创意经济是世界上发展最快的行业之一,为经济发展和多样化提供了一条充满希望的途径,尤其是在发展中国家(联合国贸易和发展会议,2022 年)。文化和创造力是人类生存和文明的基本方面,在全球经济中发挥着重要作用。仅文化部门就为全球国内生产总值 (GDP) 贡献了 3.1%(联合国教科文组织,2022 年),在有数据可查的国家,文化部门雇用了 2.6% 至 10.3% 的劳动力(联合国教科文组织文化就业统计研究所数据)。此外,联合国贸易和发展会议 (UNCTAD) 的估计显示,2022 年,创意商品和服务分别占商品和服务出口总额的 3% 和 19%(联合国贸易和发展会议统计数据中心)。
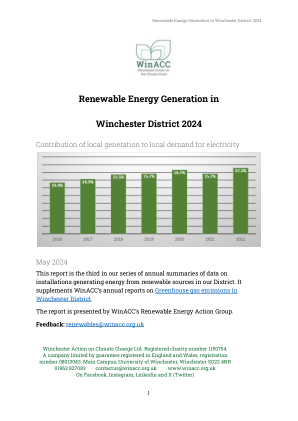
温彻斯特区 2024 年可再生能源发电
过去两年发生的事件几乎不可能比这更能激励英国家庭和企业减少对国家电网依赖的雄心。在此期间,成本飙升且波动剧烈,这主要是受地缘政治和国际能源市场的影响,这增强了人们的意识,即英国当地的太阳能和风能资源可以满足日益增长的对电力供应的需求,这些电力供应既安全又稳定,同时价格仍然可承受。在温彻斯特区,上表显示,当地电力供应对当地需求的贡献不到 20%。尽管这一比例在 2022 年(由于报告滞后,这是有数据可查的最后一年)略有增加,但我们地区的大部分电力仍来自进口,尽管国内太阳能装置的趋势急剧上升。我们地区产生的大部分可再生电力来自太阳能发电场,因为屋顶光伏装置的规模非常小,尽管正在安装更多,但与太阳能发电场相比,总产量非常低。

EAB 学术规划师快速入门指南(适用于顾问)
• 重要的是,学生要明白,Academic Planner 是一种规划工具,可以促进您的协作规划过程,但它不被视为正式的学位审核。根据他们的情况(例如,他们的目录年份、他们是否转学、是否更改专业),他们规划模板上的课程可能需要调整。应鼓励学生使用您的课程通常推荐的任何规划指南,包括 Academic Maps 和 PeopleSoft 中的学位审核。 • 如果学生不需要完成其学位模板上的课程,或者转学课程没有明确说明但导师知道该课程满足要求,则导师可以从课程前面的汉堡图标中选择“标记为已满足”,将课程标记为已完成并留下评论。 • 使用屏幕左侧的“搜索”选项卡查找和添加学生学位模板上未列出的课程。 • 单击左上角的“反馈历史记录”链接可查看向该学生提出的建议记录以及学生是否接受或拒绝了这些建议。

2023 - 2027 合作伙伴关系和沟通战略...
十年来,太平洋地区官方发展援助累计达 24 亿美元,2019 年是洛伊研究所数据可查的最近一年的全面援助数据。该地区最大的三个捐助国分别是澳大利亚(8.646 亿美元)、新西兰(2.539 亿美元)和日本(1.793 亿美元),这三个国家的赠款总额占该地区所有官方发展援助的 53% 以上。最大的三个贷款国分别是亚洲开发银行 (ADB)(1.686 亿美元)、中国(1.132 亿美元)和世界银行(6680 万美元),贷款总额占该地区所有官方发展援助的 14.2%。随着疫情的爆发,截至 2021 年底,太平洋地区与新冠疫情相关的外部财政援助激增,总额达 33 亿美元(约占该地区年 GDP 的 10%),其中大部分是新增资金。 4. 该地区最大、最持续的捐助者是垂直基金,例如

2020 年阿片类药物危机造成的经济损失接近 1.5 万亿美元
1 JEC 对 2018 年至 2020 年(有数据可查的最近一年)阿片类药物使用障碍和致命阿片类药物过量造成的经济损失进行了新的估计。JEC 的这些估计值是通过将 CDC 2017 年阿片类药物使用障碍和致命阿片类药物过量的人均成本估计乘以 2018 年、2019 年和 2020 年阿片类药物使用障碍病例总数和致命阿片类药物过量总数,然后根据通货膨胀调整总成本,使每个总额以 2020 年的美元计算得出的。2017 年的总额也根据通货膨胀率调整为 2020 年的美元。CDC 通过考虑医疗保健、公共安全、生产力损失、生活质量下降和因阿片类药物造成的生命损失,得出了阿片类药物使用障碍和致命阿片类药物过量成本的原始估计值。 JEC 的成本估算仅限于 2020 年,因为 2021 年阿片类药物使用障碍患者人数的数据要到今年晚些时候才会公布。
背景文件 2023 年 5 月 24 日 - 加州议会
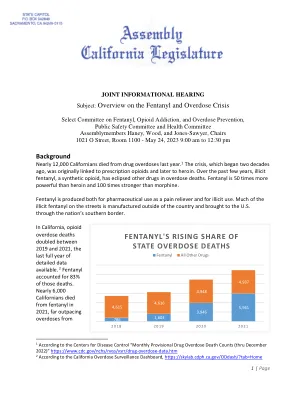
公共安全委员会和卫生委员会议员 Haney、Wood 和 Jones-Sawyer,主席 1021 O Street,1100 室 - 2023 年 5 月 24 日上午 9:00 至下午 12:30 背景 去年,近 12,000 名加州人死于药物过量。1 这场危机始于二十年前,最初与处方阿片类药物有关,后来与海洛因有关。在过去几年中,非法芬太尼(一种合成阿片类药物)在过量死亡人数方面超过了其他药物。芬太尼的药效是海洛因的 50 倍,是吗啡的 100 倍。芬太尼既可用于止痛药,也可用于非法用途。街头的大部分非法芬太尼都是在国外制造的,并通过美国南部边境运入美国。在加州,阿片类药物过量致死人数在 2019 年至 2021 年(有详细数据可查的最近一年)之间翻了一番。2 芬太尼占这些死亡人数的 83%。2021 年,近 6,000 名加州人死于芬太尼,远远超过

多方面气溶胶对降水的影响
气溶胶会影响从单个云到地球的量表的降水速率和空间模式。然而,关于在空间和时间尺度上多种效应的基本机制和重要性仍然存在很大的不确定性。在这里,我们回顾了这些效果背后的证据和科学共识,通过修改辐射通量和能量平衡来归类为辐射效应,以及通过修饰云滴和冰晶的修改,将其归类为辐射效应。存在广泛的共识和强有力的理论证据,表明气溶胶辐射效应(气溶胶 - 放射相互作用和气溶胶 - 云相互作用)充当降水变化的驱动因素,因为全球平均降水受到能量和表面蒸发的约束。同样,气溶胶辐射效应会导致大规模降水模式的据可查的偏移,例如间受反应收敛区。气溶胶对较小尺度下降水的影响的程度尚不清楚。尽管存在广泛的共识和有力的证据表明,气溶胶扰动微物理会增加云滴数量并减少液滴大小,从而减慢了降水液滴的形成,但总体气溶胶对跨尺度的降水的总体效应仍然高度不确定。全球云解析模型提供了调查目前在全球气候模型中尚未很好地代表的机制,并与较大的规模连接局部效果。这将增加我们对预测气候变化影响的信心。