XiaoMi-AI文件搜索系统
World File Search System台口
台达无感测向量控制小型驱动器 VFD-EL 系列使用手册
感谢您选择台达多功能 VFD-EL 系列。VFD-EL 系列采用高品质组件和材料制造,并结合了最新的微处理器技术。本手册用于交流电机驱动器的安装、参数设置、故障排除和日常维护。为保证设备安全运行,在将电源连接到交流电机驱动器之前,请阅读以下安全指南。请保留此操作手册并分发给所有用户以供参考。为确保操作员和设备的安全,只有熟悉交流电机驱动器的合格人员才能进行安装、启动和维护。在使用 VFD-EL 系列交流电机驱动器之前,请务必仔细阅读本手册,尤其是“警告”、“危险”和“小心”说明。未遵守规定可能会导致人身伤害和设备损坏。如果您有任何疑问,请联系您的经销商。请在安装前阅读安全须知。

单台机器问题的深度学习驱动算法最小化总迟到
在本文中,我们研究了深度学习方法来解决众所周知的NP单机调度问题,目的是最大程度地减少迟到的目的。我们提出了一个深层的网络,该网络是基于Lawler的分解和Della Croce等人提出的基于Lawler的分解和对称分解的单次调度算法中标准值的多项式估计器。本质上,神经网络通过估计问题分解为子问题来指导算法。本文还描述了一种生成培训数据集的新方法,该方法可以加快培训数据集的生成并减少解决方案的平均最佳差距。实验结果表明,我们的机器学习驱动的方法可以有效地将信息从训练阶段概括为明显更大的实例。尽管训练阶段使用的实例从75到100个工作岗位,但多达800个工作岗位的实例的平均最佳差距为0.26%,几乎是最先进的启发式启发式差距的差距差不多五倍。
2024科学与工程学院毕业论文介绍
实验室名称1富士实验室2山摩托实验室3山原实验室4萨萨哈拉实验室5木马实验室6 Murata实验室7 Murata实验室8 Kawabata Laboratory 9 Kawabata实验室9 Okubo实验室10 Shibuo Laboratory 10 Shibuo实验室实验室11 Matsuoka Laboratory 12 Yamada Laboratory 13 YAMADA Laboratory 14 Okub sheratory 14 Okuubi fujiuchi 14 o实验室18 SASA实验室19 Shibuo实验室20 Noguchi实验室21 Fujiuchi Laboratory 22 Kawabata Laboratory 23 SASA实验室23 SASA实验室24 Noguchi Laboratory 25 Shibuo实验室25 Shibuo实验室26 IWAI实验室27 SASA实验室27 Sasa Laboratory 28 Kawabata Labotoration 28 Kawabata实验室29 Haseguchi Laguchi Laguchi Laboratory 30 Noguchi Laboratory 31 Noguchi Laboration 31 31 Murata实验室32 Fujiuchi实验室33 Yamada Laboratory 34 Fujiuchi Laboratory 35 Sakamoto Laboratory 36 SASA实验室37 Hasegawa Laboratory 38 Hasegawa Laboratory

迈向算法的保真度:综合与人类生成的数据中人口统计学的心理健康表示
抽象合成数据生成有可能用稀缺数据影响应用程序和域。但是,在将这些数据用于诸如心理健康之类的敏感任务之前,我们需要了解其中如何代表不同的人口统计学。在我们的论文中,我们通过探索IT归因于不同种族和性别组合的各种压力来分析使用GPT-3生成综合数据的潜力,从而为未来的研究人员提供洞察力,以期利用LLMS使用LLM进行数据生成。使用GPT-3,我们通过控制种族,性别和时间范围(Covid-19)之前和时间范围,开发了3,120个有关抑郁症触发压力源的合成数据集的合成数据集。使用此数据集,我们将语义和词汇分析进行(1)确定每个人口组的主要应力源; (2)将我们的合成数据与人类生成的数据集进行比较。我们介绍了使用GPT-3生成查询以开发抑郁数据的程序,并进行分析以发现其分配给人群组的压力源的类型,这些压力源可用于测试抑郁数据合成数据生成的LLMS的局限性。我们的发现表明,合成数据模仿了各种人口统计学的主要抑郁压力源的某些人类生成的数据分布。

在1.3 k处的量子记忆,带有锡的视口中心和光子电路
在距离处生成和维持量子纠缠仍然是量子信息科学的核心挑战。一个主要目标是利用基于摩尔定律的相同的可扩展技术和技术来扩展量子设备,以扩展量子设备,以使高速公路和富裕度所需的系统大小。在这项工作中,我们扩展了Wan等。al。2020 [1]通过演示和操纵原子记忆中的长期自旋自由度,作为基于硅氮化硅(SIN)光子光子整合电路(PICS)的立即量表平台的一部分。钻石中的氮呈(NV)中心等固体中的原子记忆使远程纠缠的产生能够出色的广告[2],尽管缺乏光学稳定性,尤其是在纳米制造的结构中,尤其是在纳米构造的结构中,她的努力是缩放的努力。组IV颜色中心(例如硅接收中心(SIV)中心由于其对称性保护的光学稳定性而引起了人们的关注[3]。但是,声子浴有限的连贯性要求大多数SIV中心运行约100 mk。正如我们在这项工作中所证明的那样,锡空位(SNV)中心的尺寸较大轨道分裂(SNV)中心可以以1 K [4]的速度进行操作温度。
RNase抑制剂的安全数据表,Murine(M1018)JPN
The following values are as follows: The following values are as follows: The following values are as follows: The following values are as follows: The following values are as follows: The following values are as follows: Chapter 3.1 of the document in the document in the GHS document Calculated based on chapter Calculated based on chapter ATEm ix(oral) ATEm ix(oral) ATEm ix(oral) ATEm ix(oral) ATEm ix(oral) ATEm ix(口服)25,200.00 mg/kg ix(真皮)Atem ix(真皮)Atem ix(真皮)Atem IX(真皮)Atem IX(真皮)Atem IX(皮肤IX(皮肤)IX(皮肤)IX(Dermal)Atem ix(Dermal)Atem IX(Dermal)Atem IX(Dermal)Atem IX(Dermal)Atem IX(Dermal)IX(Dermal)Ix(Dermal IX IX(Dermal Ix), ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - Gas) Gas) Gas) Gas) Gas) 99,999.00 ppm ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEm ix(Inhalation - ATEM IX(吸入 - Atem IX(吸入 - Atem IX(吸入 - Atem IX)(吸入 - atem/atem/mist mist mist mist mist mist雾雾)99,999.00 mg/l

7岁女孩中脑神经的性吞噬造口术:一种罕见的病例
schwannomas是由Schwann细胞引起的良性周围神经鞘肿瘤。在涉及颅神经时,他们在儿童中很少见。降低神经schwannomas占所有头部和颈部schwannomas的5%,使其在小儿种群中成为异常发现[1,2]。大多数成年中存在的次咽造型患者和儿童期病例极为罕见。腹神经(颅神经XII)控制舌头的运动,其schwannomas通常起源于颅内或性脑性区域。肿瘤的生长会导致相邻结构的压缩,并且取决于肿瘤的位置,症状可能从无痛的宫颈肿块到腹神经麻痹,其特征是同侧舌头无力和萎缩。

要启动你的出生月份审核,你需要向 OSTC 管理帮助台发送电子邮件:
要完成人事记录审查 (PRR):*审查您的陆军军事人力资源记录 (AMHRR) ( https://iperms.hrc.army.mil/rms/ )。您的 AMHRR 中应该有一份源文档,其中包含 ORB 第 I/IX、Ill、IV、V、VI、VII、VIII 部分中的所有信息。注意:奖项需要在您的记录中同时包含证书和 DA 表格 638。只能使用 Internet Explorer 访问此系统,其他浏览器将不允许您签署审查。*审查您最新的月末 LES ( https://mypay.dfas.mil/ )。您的 AMHRR 中应该有一份源文档,其中包含 LES 上的所有权利。*如果您有任何缺失的源文档需要上传到您的 AMHRR,请将其发送到 OSTC 管理员帮助台邮箱。 *收到您的 ORB/ERB/LES 后,人力资源专家将在 iPERMS 中启动您的 PRR,并在您的 PRR 准备好供您审核/签名时与您跟进。

使用云台机制进行自主无人机应用的主动对象检测和跟踪
摘要:对象识别,本地化和跟踪在计算机视觉应用中起着原始重要性的作用。但是,这仍然是一项极其艰巨的任务,尤其是在需要使用快速移动的无人机需要实时操作的对象的情况下。通常,这些基于视觉的系统的性能受到运动模糊和几何扭曲的影响,仅举两个问题。gimbal系统对于补偿运动模糊并确保视觉流稳定至关重要。在这项工作中,我们使用安装在无人机上的三级式(DOF)gimbal系统研究了主动跟踪方法的优势。提出了一种利用关节运动和视觉信息实时跟踪球形和平面对象的方法。跟踪方法在两个不同的逼真的凉亭仿真环境中进行了测试和评估:3D位置跟踪(球形)的第一个,第二个是6D姿势(平面基准标记)的第二个。我们表明,主动对象跟踪对于无人机应用是有利的,首先是通过减少动作模糊,这是由快速摄像机运动和振动引起的,其次,通过将感兴趣的对象固定在视场的中心内,从而减少了由于外围畸变而引起的重新投射错误。与传统的被动方法相比,结果表明有效的物体估计精度提高了主动方法的精度。更具体地说,一组实验表明,在具有挑战性的运动模式的条件下,在图像失真的情况下,主动的万日跟踪可以提高已知大小移动对象的空间估计精度。
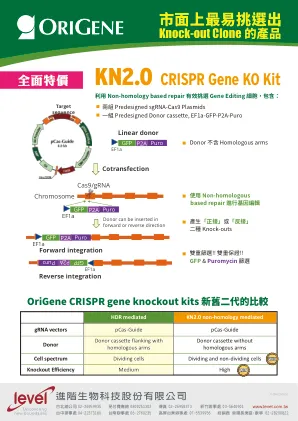
KN2.0 CRISPR 基因 KO 试剂盒
07-5539956 高屏台东办事处02-28200822 经销商荣阳长庚区:康宁06-2760235 台南办事处04-22373160 台中办事处