XiaoMi-AI文件搜索系统
World File Search System合作系统

开放人手合作系统(OHRCS)
摘要人类机器人合作(HRC)是人类和机器人的范式,在共同的工作空间中协同工作。先前的研究模型,例如由固定数量的代理组成的多构想系统。这样的模型在整个过程中的数量和类型保持恒定,称为封闭系统。conconly是一种人类机器人协作,在任务过程中,团队大小在任务中动态变化称为开放性HRC系统(OHRCS)。OHRC可以通过允许代理商加入或根据需要离开任务来实现人类机器人协作的现实表示。在本文中,我们认为许多真实世界的HRC场景更好地建模为OHRC。我们介绍了OHRC的愿景,目前的潜在应用,检查HRC中开放性的好处,并为将来的研究提供了一些途径。
(CUI) 对国防部安全非机密网络的网络安全控制的评估
(U) 根据国防部指令 8510.01,每个国防部信息系统、国防部合作系统和平台信息技术系统都必须有一名授权官员,负责在实现和维持可接受的风险态势的基础上授权系统的运行。ATO 是由一名或多名联邦高级官员做出的官方管理决定,授权信息系统的运行,并明确接受对机构运营(包括使命、职能、形象或声誉)、机构资产、个人、其他组织和国家的风险,基于实施商定的一套安全和隐私控制。7 IWTSD 国际项目经理是一名高级主管,担任 SUNet 的授权官员。

2021 年 PSTC 课程目录
威廉王子县消防救援系统是该县消防救援部门和八个志愿消防救援部门的合作系统,负责为威廉王子县及其下属城镇提供消防、救援和紧急医疗服务计划。县消防救援部门负责人担任该系统的领导,负责监督所有消防、救援、EMS、应急管理、防火和其他相关公共安全运营和管理职能。

基于ROS的双机械臂协同感知抓取系统设计与实现
机器人手臂任务中的感知技术。通过分析机器人臂的运动学并设计双臂合作系统,将视觉点云技术结合起来,实现双臂合作握把,并通过使用ROS平台来验证合作社CON-TROL策略的有效性,从而构建双臂臂系统的实验平台。主要研究内容包括分析机器人ARM运动学的正和反向运动学模型,视觉点云识别在双臂合作任务中的应用,双臂合作控制策略的实现以及合作掌握的实验结果和分析。通过这项研究,成功设计和实现了基于ROS的双机器人臂合作感,并实现了双臂合作控制策略的有效性。
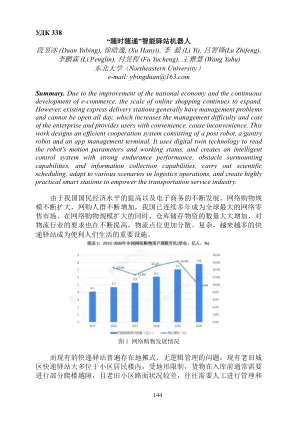
段昱冰(Duan Yubing), 徐晗逸, (Xu Hanyi), 李毅(Li Yi), ...
摘要。由于国民经济的改善和电子商务的持续发展,在线购物的规模不断扩大。但是,现有的快速交付站通常存在管理问题,并且不能整天开放,这增加了企业的管理困难和成本,并为用户提供便利。引起不便。这项工作设计了一个有效的合作系统,该系统由邮政机器人,龙门机器人和应用程序管理终端组成。它使用数字双技术来读取机器人的运动参数和工作状态,并创建一个具有良好耐力性能的智能控制系统,障碍超越能力和信息收集能力,执行科学调度,适应物流操作中的各种方案,并创建高度实用的智能站,以增强运输服务行业的能力。
校长的报告
工作生活平衡 - 我上面的观点是,我们想尽早移动,并获得最佳状态。同样,我很高兴明年谁想留在MWPS。我们已经在MWP上努力创建和环境,这解决了有关教师为什么要离开专业的许多担忧 - 这些问题已经过时了,以及与高问责制有关的压力。在本学期开始时,我再次与Sta效率进行了“ 1:1聊天”,我很高兴听到STA效率感到我们在学校的工作生活平衡。sta效应告诉我,他们不需要带工作回家,因为我们拥有合作系统,并在MWPS上提供了协作支持,因此工作是在学校完成的。这反映了我们(主要班级团队)一直在围绕工作生活平衡的信息。在学校努力工作,在学校外过上生活。,如果我们得到了正确的平衡,那么我们在两个空间中都充满活力,这对每个人都有好处。

francesco saverio cataliotti
ScuolaSuperiore di Catania SSC的量子信息实验室科学总监(2002/01/11/31/10/2007)。镜头指令理事会成员(2004年1月9日 - 2007年1月9日)。研究与培训网络国家协调员(RTN)“原子芯片”(FP6 2004-2008)。V-INFN集团“ Squat”的国家协调员(2004-2005)V-INFN集团“ Squat-Super”的国家协调员(2004- 2005)Prin的本地协调员“ Prin”的“凝结系统中的合作系统及其现实化的Antomic Chip Geaption”的合作系统协调员。(COFIN2005)。项目“ Chimono”项目的欧洲协调员(Strep)(FP7 2008-2011)。FIRB“ Ricerca 2008 In Futuro in Ricerca in Ricerca in Hyteq”(2010-2013)的本地协调员自2010年以来,Erasmus Mundus Mundus Mundus联合博士学位“ Europhotonics”的本地协调员自2010年以来,欧洲欧洲协调员“ Malicia”项目“ Malicia”(Strep)(fp7 2011-2011-2014-2014)。量子科学与技术联合研究中心QSTAR联合研究中心(2012-2016)自2014年以来,欧洲原子系统委员会(EGAS)董事会秘书•Prin的本地协调员“集体量子现象:来自强相关系统到量子模拟器的质量模拟器,”(COFIN2010-11)。 CNR-Coordinator of Project “QuantERA” (ERANET Cofund H2020 2017-2022) National Expert for Quantum Technologies in the FET Flagship Board of Funders since 2016 Italian representative in the European Quantum Communication Infrastructure (EuroQCI) Board since 2019 Research Activity: My activity is mainly experimental and is centred on atomic physics and atom-laser interactions.它可以分为线条,即开始形成非线性原子激光相互作用,发展为原子动量状态,激光冷却和Bose-Einstein冷凝物的实现的操纵。冷凝物的光学操纵已允许研究有关超流体和宏观量子状态的问题。最近,我一直关注其他一致的微观渗透技术,该技术与原子,分子和微力系统有关,其视角范围从量子计算到单分子操作。我是国际同行评审期刊的80多篇科学论文的作者,以及对会议和讲习班的众多贡献。总的来说,迄今为止,我的作品已收到3300多次引用(每项工作32次引用),H索引为26(WOS Data,ResearcherID K-4772-2015; orcid.org/0000-0000- 0000- 0003-44458-7977)。

探究律师与人工智能之间的合作关系
并在使用我们的 AI 驱动系统训练和评估模型以从文档中提取信息时调整他们的行为。我们试图了解我们的用户如何发展和建立他们的本体感觉,1 这指的是我们的身体位置和自我运动的感觉,与我们的 AI 驱动系统有关。为了帮助奠定我们的故事的基础,我们使用了两个舞者和他们互动的激励例子,因为他们都必须发展这种感觉才能成功跳舞。通过对从我们的用户群体中抽取的九名参与者进行半结构化访谈,我们试图了解他们如何学习训练我们的系统,改进其有效性,以及他们的行为如何随着时间的推移而改变。首先,我们首先描述我们的参与者在日常工作流程中使用的底层系统,以便为系统的功能提供足够的背景信息。然后,我们概述了我们的研究方法、人口统计和半结构化访谈的编码实践。在对访谈进行编码后,我们详细描述了从编码过程中收集到的各种高级见解,并使用舞蹈隐喻来帮助巩固这些见解。特别是,我们关注参与者如何学习训练系统,使用系统的误报和漏报来指导改进,并利用他们对系统的理解开始改进他们的文档注释策略以适应系统的行为。根据这些观察,我们提出了人类和人工智能合作系统设计的意义。

美国国土安全委员会
董事长拉塔(Latta),排名成员卡斯特(Castor)和委员会成员,感谢您有机会今天作证。我的名字叫Todd Brickhouse,我担任Basin Electric Power Cooperative(Basin Electric)的首席执行官兼总经理。我今天作证,以提供自己的见解作为合作负责人,并代表国家农村电力合作社协会(NRECA)。Basin Electric是一家非营利性的传输(G&T)合作社,由139个成员合作系统拥有,跨越了300万成员所有者的9个州。其地理占地面积覆盖了近500,000平方英里,约占美国的12%。它是由农村美国人建立的,目的是为大平原人民带来可靠,负担得起和负责的能源。已有60多年的历史,发电和传输资产一直是养活全世界的服务领域的商业引擎。Basin Electric拥有并维护2600英里的高压输电线路,119个变电站和224个电信站点,可为集成系统提供电力。盆地电气是美国最大的G&T,总销售额(3820万兆瓦时(MWH)),会员销售(3210万MWH)和第二大资产(82亿美元)。nreca是全国贸易协会,代表全国近900个农村电力合作社,包括64个G&T合作社和832个分销合作社。这些非营利性实体由他们所服务的人独立拥有和管辖。电动合作社为48个州的4200万美国人提供了电力,在56%的美国景观中保持灯光 - 主要是住宅且人口稀疏的地区。这些特征使电动合作社的操作比其他部门更昂贵。这意味着不断要求合作社以更少的速度做更多的事情,然后他们交付。

Teijin和Hilleman实验室扩大亚洲业务
Teijin和Hilleman实验室通过战略合作伙伴关系扩大亚太地区的业务,以促进Tokyo的CDMO服务,2024年10月30日 - Teijin Limited和Hilleman Laboratories,这是一家位于新加坡的生物技术公司,总部位于新加坡,今天宣布,今天宣布,签署了一项融资的纪念活动,以签署一项策略性的国际业务,以建立一项战略性的商业企业。该合作伙伴关系的目标是促进细胞和基因治疗领域的合同开发和制造组织(CDMO)业务的扩展。根据这种合作伙伴关系,Teijin和Hilleman Laboratories将利用其个人优势来促进更大的协同作用,以开发和制造细胞和基因治疗产品,并相互推进各方的CDMO业务活动。伙伴关系是为了加强旨在扩展到亚太地区并吸引从新加坡和周边地区到日本市场的海外客户的日本客户的支持。此外,Teijin和Hilleman Laboratories在新加坡建立支持系统以开发和制造细胞和基因疗法的愿景。2023年11月,希尔曼实验室(Hilleman Laboratories)推出了最新的工厂,这是30,000平方英尺的当前良好制造实践(CGMP)试点级工厂。在此基础上,Teijin将支持Hilleman Laboratories在新加坡建立一个细胞加工中心进行细胞和基因疗法。Teijin在这一领域的积累知识和经验将与Hilleman实验室共享。与希尔曼实验室的合作关系将有助于实现这一目标。“ Teijin和Hilleman实验室正在通过制造为创新的医疗服务做出贡献,” Teijin Limited的Mission Execifation兼Regenerative Medicine&植入医疗设备部总经理Takayuki Nakano博士说。“我们将为细胞和基因疗法CDMO业务建立强大的合作系统,以为亚太地区的客户提供更理想的开发和制造支持服务。” Teijin Group将投资于满足客户需求的设施和人力资源,其目标是在2030财年之前产生200亿份再生医学销售。“在希尔曼实验室,我们的使命是提供有影响力的医疗保健解决方案。”“与Teijin的合作关系标志着Hilleman Laboratories扩大我们在生物处理方面的能力的旅程通过将我们的专业知识与Teijin的