
机构名称:
¥ 1.0
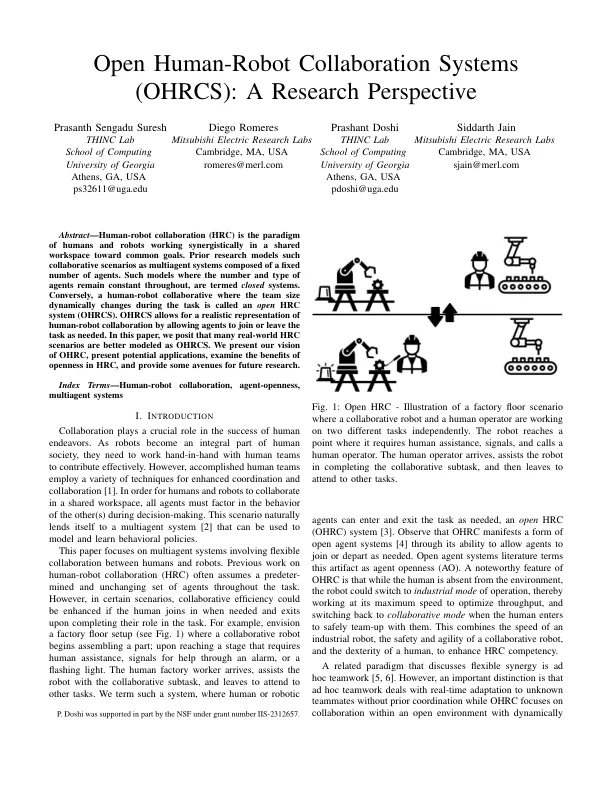
摘要人类机器人合作(HRC)是人类和机器人的范式,在共同的工作空间中协同工作。先前的研究模型,例如由固定数量的代理组成的多构想系统。这样的模型在整个过程中的数量和类型保持恒定,称为封闭系统。conconly是一种人类机器人协作,在任务过程中,团队大小在任务中动态变化称为开放性HRC系统(OHRCS)。OHRC可以通过允许代理商加入或根据需要离开任务来实现人类机器人协作的现实表示。在本文中,我们认为许多真实世界的HRC场景更好地建模为OHRC。我们介绍了OHRC的愿景,目前的潜在应用,检查HRC中开放性的好处,并为将来的研究提供了一些途径。
开放人手合作系统(OHRCS)
主要关键词




相关文件推荐






















![[开放柜台] 租车](/simg/4/4dfa9f6c7cb76abae14ac361789e64a37ca0e8af.png)
