XiaoMi-AI文件搜索系统
World File Search System命令集
F50L1G41LB (2M) 闪存
一般描述 串行电气接口遵循行业标准串行外设接口 (SPI),在必须将引脚数保持在最低限度的系统中提供经济高效的非易失性存储器存储解决方案。该设备是基于标准并行 NAND 闪存的 1Gb SLC SPI-NAND 闪存设备,但为 SPI 操作定义了新的命令协议和寄存器。它也是 SPI-NOR 的替代品,与 SPI-NOR 相比,具有更出色的写入性能和每位成本。命令集类似于通用 SPI-NOR 命令集,经过修改以处理 NAND 特定的功能和新功能。新功能包括用户可选择的内部 ECC。启用内部 ECC 后,当将页面写入内存阵列时,会在内部生成 ECC 代码。ECC 代码存储在每个页面的备用区域中。当将页面读入缓存寄存器时,将再次计算 ECC 代码并将其与存储的值进行比较。如有必要,将纠正错误。该设备输出更正后的数据或返回 ECC 错误状态。
F50L1G41LB(2M)Flash
一般说明串行电气接口遵循行业标准的串行外围界面(SPI),在系统中提供了具有成本效益的非挥发存储器存储解决方案,在该系统中,必须将PIN计数保持在最低限度。该设备是基于标准并行NAND Flash的1GB SLC SPI-NAND闪存设备,但是为SPI操作定义了新的命令协议和寄存器。它也是Spi-nor的替代方法,提供了出色的写作表现,并且每位比Spi-Nor提供了成本。命令集类似于常见的spi-nor命令集,已修改以处理NAND特定功能和新功能。新功能包括可选择用户的内部ECC。启用了内部ECC,当页面写入内存数组时,内部生成了ECC代码。ECC代码存储在每个页面的备用区域中。当将页面读取到高速缓存寄存器时,将再次计算ECC代码并将其与存储值进行比较。必要时会纠正错误。该设备要么输出校正数据或返回ECC错误状态。

ET6202 WM8728
o rder 1:显示MODE COMM和SET ET6202作为follo w s t w o显示器:一个co mm,在高率din端口之后的s t b b y端口中,将ET6202丢失到第一个B yte(b 0〜b 7)。f或这些订单,编号3至编号6(b 2〜b5)是ig- Nored,7和8(b6〜b7)0。DISPLION模式命令集由Decage使用,GATE编号(4至7、10至13)。必须证明继续进行演出的命令。如果您选择同一模式设置,而不是实现订单,则不会显示。电力时,选择10×7位模式。

ET6202 WM8728 SC8905高效率,同步,双向Buck
o rder 1:显示MODE COMM和SET ET6202作为follo w s t w o显示器:一个co mm,在高率din端口之后的s t b b y端口中,将ET6202丢失到第一个B yte(b 0〜b 7)。f或这些订单,编号3至编号6(b 2〜b5)是ig- Nored,7和8(b6〜b7)0。DISPLION模式命令集由Decage使用,GATE编号(4至7、10至13)。必须证明继续进行演出的命令。如果您选择同一模式设置,而不是实现订单,则不会显示。电力时,选择10×7位模式。
Microsoft Word - VoiceRobotControlTechRep_v15 _Formatted_1.doc
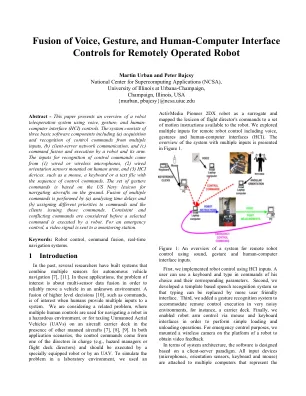
摘要 - 本文概述了使用语音、手势和人机界面 (HCI) 控制的机器人遥控系统。该系统由三个基本软件组件组成,包括 (a) 从多个输入获取和识别控制命令、(b) 客户端-服务器网络通信和 (c) 机器人及其手臂的命令融合和执行。控制命令识别的输入来自 (1) 有线或无线麦克风、(2) 安装在人臂上的有线方向传感器和 (3) HCI 设备,例如鼠标、键盘或带有控制命令序列的文本文件。手势命令集基于美国海军用于在地面导航飞机的词典。多个命令的融合通过 (a) 分析时间延迟和 (b) 为命令和发出这些命令的客户端分配不同的优先级来执行。在机器人执行选定命令之前,会考虑一致和冲突的命令。对于紧急控制,视频信号会发送到监控站。