XiaoMi-AI文件搜索系统
World File Search System地形图

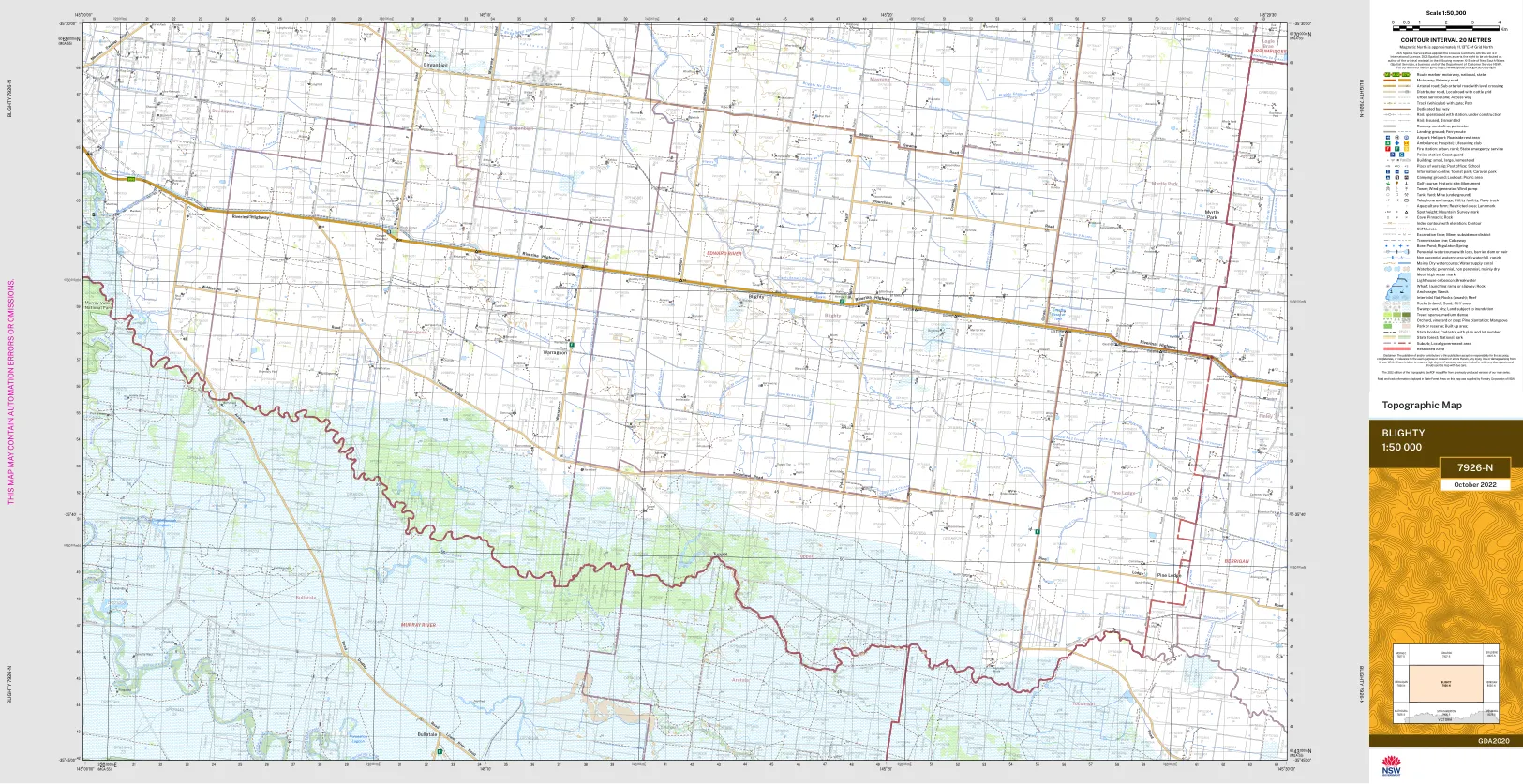
地形图 BLIGHTY 1:50 000 7926-N
Ò Ò Ò Ò Ò Ò 𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 Ò 𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò𝐓𝐡𝐞𝐫 𝐓𝐡𝐞𝐫 Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò Ò ÒÒ Ò Ò Ò Ò Ò Ò Ò面向对象ÒÒÒÒÒÒÒÒÒÒÒÒÒÒÒÒÒÒ面向对象面向对象

超越分区的大脑地形图:功能图的局部梯度
功能性神经成像提供了独特的机会,可以根据大脑区域对任务或正在进行的活动的反应来描述大脑区域。因此,它具有捕捉大脑空间组织的前提。然而,描述这种组织的概念框架仍然难以捉摸:一方面,分区隐含地建立在分段常数组织上,即由清晰边界分隔的平坦区域;另一方面,最近流行的功能梯度概念暗示了一种平滑的结构。注意到这两种观点都趋向于将功能特征的局部变化拼凑在一起的拓扑方案,我们对基于局部梯度的模型进行了定量评估。使用功能性磁共振成像 (fMRI) 数据的预测作为驱动案例——具体来说,从受试者的静止 fMRI 图中预测任务 fMRI——我们基于参考拓扑词典开发了一个逐块线性回归模型。我们的方法使用多个随机分区——而不是单个固定分区——并汇总这些分区的估计值以预测遗漏受试者的功能特征。我们的实验证明了分割的最佳基数的存在,以捕捉功能图的局部梯度。

人类颈部硬膜外脊髓电图地形图显示不同的随意运动
研究文章 | 系统/电路 人类颈部硬膜外脊髓电图地形图显示不同的意志运动 https://doi.org/10.1523/JNEUROSCI.2258-23.2024 收稿日期:2023 年 11 月 27 日 修订日期:2024 年 4 月 22 日 接受日期:2024 年 6 月 6 日 版权所有 © 2024 作者

水坝(湿地 1)/2022-00063-JLK 州:威斯康星城
解释:根据对航空摄影、地形图和请求者提交的湿地划定报告的审查,我们已确定湿地 1 是一个孤立的湿地洼地,其边界过渡到高地。如当前和历史航拍图像所示,在划定的湿地特征内观察到的湿地特征并未延伸到该湿地之外,并且它完全被高地包围,包括西边的农田、北/东北的商业开发区和南/东南的铺砌道路。此外,审查区域主要是平坦的,湿地边界附近的海拔略有增加,如美国地质调查局地形图所示。湿地 1 不毗邻美国任何水域,也没有被自然或人为的障碍物与美国任何水域隔开


生成高分辨率数字高程模型...
地理信息系统 (GIS) 生成的数字高程模型 (DEM) 已被证明是水文研究中的有用工具,除其他外,它有助于划定集水区、确定排水模式和流径以及确定径流。它们在地形相对平坦的地区特别有价值,因为这些地区通常很难完成这些任务。然而,由于湿地的高程差异通常低于或刚好在标准地形图的等高线间隔范围内,标准地形图的等高线间隔通常为 20 米,某些地区为 5 米,因此后者无法提供足够的细节。这意味着湿地研究通常很难获得足够详细的地形信息。相对于许多研究预算而言,针对特定地点的高分辨率地形调查过于昂贵,无法成为可行的替代方案。本文以喀斯特泥炭地周围约 12 平方公里的研究区域为基础,介绍了一种以 1 米为间隔、低成本从 Google Earth TM 卫星图像中检索所需高分辨率高程数据的方法。本文介绍了使用 GIS ArcDesktop™ 捕获和处理数据以生成高分辨率等高线图和 DEM 的程序。为了保证质量,将生成的地图与总局测绘局 (CDSM) 发布的 5 米和 20 米等高线间隔标准地形图 (1:50000) 进行视觉比较。c 之后

不列颠哥伦比亚省地形测绘指南和标准
序言和致谢 指南和标准的目的和内容 致谢 1.0 引言 1.1 历史回顾 1.2 地形测绘和地表地质测绘:定义和比较 2.0 不列颠哥伦比亚省地形和地表地质图的来源 2.1 引言 2.2 机构 2.3 现行测绘计划 2.3 地形测绘人员和地形测绘资质 3.0 地形图的使用 3.1 现有地图用户 4.0 基本地形图 4.1 地形多边形的定义 4.2 划定地形多边形 4.3 多边形边界线 4.4 地形符号:字母符号 4.5 现场符号 4.6 地图比例尺和地形勘测强度等级(TSIL) 5.0 方法论 I:启动项目 5.1 确定项目目标 5.2 选择地图比例尺和调查强度等级 5.3 选择航空照片 5.4 回顾先前的工作,包括先前的测绘 6.0 方法论 II:航空照片解释 7.0 方法论 III:实地工作 7.1 目标 7.2 实地工作所需时间 7.3 初始程序 7.4 观测地点 7.5 实地检查方法 7.6 收集的数据和数据表格 7.7 数据模型 7.8 样本收集和实验室分析 7.9 收集基岩数据 7.10 晚间活动 8.0 方法论 IV:编制地形图 8.1 确定航空照片上的地形信息 8.2 将地形数据传输到底图或其他介质上 8.3 准备地图图例 8.4 附加信息

在收获和收获中使用激光雷达地形的吸引力和缺陷......
在采伐和道路设计中使用激光雷达地形测量的诱惑和陷阱 Finn Krogstad 和 Peter Schiess 论文发表于 2004 年 6 月 13-16 日在不列颠哥伦比亚省温哥华举行的 IUFRO 3.06 山地森林作业联合会议和第 12 届国际山地伐木会议摘要机载激光测高 (Lidar) 可以生成极其详细和准确的地形图,即使在被森林冠层遮挡的地面上也是如此。详细的激光雷达地形图可以识别可能的着陆地点、难以穿越的溪流、不稳定的土壤、难以穿越的边坡和有用的长凳。这些细节可以减少现场时间,指导道路设计选择更好的方案,并提高我们对成本估算的信心。然而,激光雷达测绘偶尔也会失败,这些失败的表现方式将决定激光雷达的可靠性和对道路设计的价值。我们讨论了首次使用激光雷达对雷尼尔山南部的塔霍玛州立森林进行测绘的经验。这种详细的地形测绘被用于森林作业设计,例如着陆点和道路位置,作为基于流域的采伐和运输计划的一部分。随后对基于激光雷达的办公室设计进行了实地验证。这种 DEM 在森林工程设计中取得成功的关键在于能够(或缺乏)区分地面点覆盖充足或边缘的区域,从而导致测绘细节优秀或错误。我们讨论了各种方法,这些方法可以识别激光雷达地面点覆盖边缘的区域,从而形成测绘承包商应遵守的第一组激光雷达数据收集要求。看到树冠下的情况木材采伐和道路规划中反复出现的一个问题是,用于采伐的树木可能会遮挡必须堆放原木和修建道路的地面。规划中常用的地形图基于航空照片,其中我们现在想要采伐的林分遮挡了我们必须规划的地面。因此,得到的地形图是顶部树冠的地图,带有假定树高的偏移量。不幸的是,树冠并不完全贴合地面,在采伐和道路规划中至关重要的细微地形变化并没有反映在最终的树冠顶部。地形通常包括土壤不稳定、岩石露头和不平坦的地形,这些可能会给采伐和道路带来困难。树冠还会遮挡可以作为方便着陆和道路位置的天然土丘和长凳。因此,这些地形图只能作为设计的一般指南,操作的关键要素需要基于现场验证。机载激光地形扫描 (Lidar) 的最新发展使得即使在森林树冠下也可以进行详细的地形测绘。激光雷达的工作原理是拍摄数百万

卷积神经网络
脑电图 (EEG) 使用放置在头皮上的传感器实时测量大脑电活动。必须识别并消除由于眼球运动和眨眼、肌肉/心脏活动和一般电干扰而产生的伪影,以便正确解释 EEG 的有用脑信号 (UBS)。独立分量分析 (ICA) 可有效地将信号分成独立分量 (IC),这些分量在 2D 头皮地形图 (图像)(也称为地形图)上的重新投影允许识别/分离伪影和 UBS。到目前为止,IC 地形图分析(EEG 的黄金标准)一直由人类专家以视觉方式进行,因此无法用于自动、快速响应的 EEG。我们提出了一个基于 2 D 卷积神经网络 (CNN) 的 IC 拓扑图脑电图伪影识别的完全自动化和有效框架,能够将拓扑图分为 4 类:3 种伪影类型和 UBS。描述了框架设置,并展示、讨论了结果,并将其与其他竞争策略的结果进行了比较。在公共脑电图数据集上进行的实验表明,总体准确率超过 98%,在标准 PC 上用 1.4 秒对 32 个拓扑图进行分类,即驱动一个由 32 个传感器组成的脑电图系统。虽然不是实时的,但提出的框架足够高效,可用于基于快速响应脑电图的脑机接口 (BCI),并且比其他基于 IC 的自动方法更快。