XiaoMi-AI文件搜索系统
World File Search System地形条件

山地自行车 - 运动策略。 NCEA PE成就标准1.1
其他骑手通过调整速度/速度成功谈判地形来期待和回应其他骑手。环境条件可以通过调整速度/速度/技术/车身定位来成功协商地形,对环境条件(湿/滑/干/尘土)进行预期和响应。转弯预期并响应地形条件,通过调整速度/速度在成功导航角时进行调整。喜欢通过调整步伐/速度来成功导航随后的角落,链接预期和响应地形条件时,通过使用制动器来调整速度以顺畅地导航后续功能时,可以通过调整速度/速度来成功浏览随后的角度,从而对地形进行响应。加速

河流洪水评估和空间调查要求...
为制定总体规划,通常会在典型地点沿着所关注的河流段每隔 500 米至 1,000 米进行一次河流横截面测量,具体取决于地形图上显示的河流大小(DPWH 和 JICAa,2003 年,DPWH 和 JICAb,2003 年)。然而,为实施典型的河流结构项目,会根据河流大小进行较小比例的调查,水平比例为 1:500 至 1:2,000。垂直比例为 1:100 至 1:500,具体取决于地形条件。横截面测量间隔的测量范围为 100 米至 1,000 米。调查区域的宽度通常至少延伸至两岸以外 20 米,但如果该位置仍然是洪灾多发区(例如,基于可用的最佳洪灾灾害图),则可以进一步加宽。沿河道横断面测量间隔,窄河道为2~5m,宽河道为5~20m。

远程侦察监视系统 (LRAS3) - ciar.org
地面侦察排的主要任务是为其上级单位提供侦察和安全保障。它可以在白天或夜晚、各种地形条件、所有天气和能见度条件下骑车或越野执行任务。目前,19D MOS 侦察兵使用 M1025/26 HMMWV 和 M3 骑兵战车 (CFV)。这两种车辆都是为其他功能而设计的。M3 布雷德利是一种步兵战车,经过改装后可携带更多 TOW 导弹。HMMWV 是一种后勤支援车辆,由于它比大型 M3 CFV 更隐蔽,于 1992 年被重型特遣部队采用。HMMWV 尺寸减小且噪音较小,使其能够深入敌方作战区域而不被发现。根据 1992 年 11 月美国陆军工程兵司令部作战发展局进行的分析,CFV 和 HMMWV 均被采用和修改以满足部分侦察任务要求。这两个平台本身都不能满足侦察任务所需的所有传感器、机动性、生存能力或杀伤力。
气候模型
摘要。气候变化将在世界许多地区定义新的生活和环境状况,这是我们社会的深入探讨。公众对气候变化对社会和生态系统的影响的影响是不同的,但对于促进缓解和适应策略至关重要。为了量化气候变化并以易于理解的术语进行交流,我们使用了Köppen-Geiger的气候分类系统。84使用两种方法校正的气候预测偏置用于计算Köppen-Geiger气候类型,以8公里的分辨率在1976年至2099年在法国进行了8公里的分辨率。在2035年,大约20%的法国,无论发射情况如何,气候类型的中等变化。然而,预计在2040年的RCP 8.5下,法国86%后会发生重大变化,温带,炎热的夏天,有或没有干旱季节,以及山区温带气候的扩大。我们发现这些变化可以达到7 km·yr -1向北的平均过渡速度。这些快速变化将对农业,生物多样性,水和能源管理产生前所未有的后果,更不用说在社会上。在其他欧洲国家 /地区可能会发生类似的变化,这些国家共享法国发现的多种气候和地形条件。

改进复杂果园环境中移动机器人的路径规划:连续双向快速RRT*算法
有效的避免障碍路径计划对于具有众多不规则障碍的果园至关重要。本文提出了基于双向RRT(BI-RRT)和Quick-RRT*算法*算法的连续双向快速RRT*(CBQ-RRT*)算法,并提出了扩展成本函数,并提出了一种评估路径平滑度和长度的扩展成本函数,以克服速度rrrt* algorth的限制,以供速度* algorith for hoboRith for hoboRith for hoboRith for hobortion for hobor for。为了改善由BIRT算法的双树扩展引起的双树之间的曲折,CBQ-RRT*提出了createConnectNode优化方法,该方法有效地解决了双树连接处的路径平滑度问题。在ROS平台上进行的仿真表明,CBQ-RRT*就各种果园布局和地形条件的效率优于单向快速RRT*。与BI-RRT*相比,CBQ-RRT*分别将平均路径长度和最大趋势角度降低了8.5%和21.7%。此外,领域测试确认了CBQ-RRT*的出色性能,这是通过平均最大路径横向误差为0.334 m的表现,比BI-RRT*和Quick-Rrt*显着改善。这些改进证明了CBQ-RRT*在复杂的果园环境中的有效性。

使用混合深钢筋学习
摘要 - 在越野环境中旋转的未拧紧地面车辆(UGV)的准确路径跟踪面临着源于操作条件的多样性引起的挑战。用于Ackermann转导车辆的传统基于模型的控制器具有良好的(无防滑)路径跟踪的穿孔,但性能会以越来越不平坦的地形和更快的遍历速度下降。本文介绍了一种新颖的方法,一种混合深化增强学习(HDRL)控制器,利用了线性二次调节器(LQR)的优势和深钢筋学习(DRL)控制器,以增强Ackermann steceered ugvs的增强路径跟踪。DRL控制器主要弥补地形条件和未知车辆参数的不确定性,但训练在计算上可能很昂贵。LQR控制器在初始训练阶段指导DRL控制器,从而确保更稳定的性能并在早期迭代中获得更高的回报。这样做,这种混合方法提供了有望克服基于模型的控制器的局限性以及常规DRL方法的样本信息的局限性。在手稿中显示的初步结果显示了HDRL控制器的希望,表现出比无模型的DRL和常规反馈控制器更好的性能。

增强座舱下无人机的方法...
摘要:在林冠下使用无人机系统 (UAS) 为在茂密的林冠和灌木丛地区进行地面测量提供了一种潜在的宝贵替代方案。这项研究介绍了在具有挑战性的森林和地形条件下在林冠下飞行的消费级 UAS 的研究结果。部署该 UAS 是为了评估林冠下 UAS 摄影测量作为现场测量的替代方案,以获取树干直径以及森林研究地点的超高分辨率(~400,000 点/平方米)3D 模型。在一片原生、未经管理的桉树林中,在混合林下条件和陡峭地形下,从 99 根树干采集了 378 个基于胶带的直径测量值。这些测量值被用作基线,以评估基于林冠下 UAS 的摄影测量点云的直径测量精度。使用一种创新的基于胶带的方法,在不受数字地形模型影响的情况下评估了直径测量精度。介绍了一种创建这些点云的实用且详细的方法。最后,定义了一个称为圆周完整性指数 (CCI) 的指标,以解决在测量森林点云的树干直径时缺乏明确定义的点覆盖测量值的问题。建议在未来的研究中采用平均 CCI 的测量,以便能够使用不同的方法对森林点云的覆盖率进行一致的比较
查尔斯顿县规划委员会会议会议县议会会议厅,伦尼·汉密尔顿2楼,III公共服务大楼 查尔斯顿县现场计划审查过程 2024年9月5日发行号:4881媒体联系Chloe Field,公共信息办公室电话:(843)202-6909/FAX:(843)958-4004电子邮件:CFIELD@
奥兰治山(Orange Hill)是一个拟议的娱乐和住宅社区,位于约翰岛南部的河道和波希克路之间。933英亩的土地是Kiawah Island体育俱乐部的当前故乡,自2008年以来一直由Kiawah Resort Associates拥有。在查尔斯顿县议会面前的请求的目的是修改现有计划的开发分区权利,以更敏感地将低密度社区纳入基于大多数自然区域的保留以及大幅度降低密度和道路基础设施。在2005年,查尔斯顿县(Charleston County)将721英亩的土地划定为计划开发区,可容纳高尔夫球场,相关娱乐和181个单身家庭住宅,可从Bohicket Road进行主要通道。在对树冠,地形条件和湿地的现有自然特征进行了广泛评估之后,拟议的概念总体规划将导致住宅的规划减少到不超过120户房屋,消除了2.8英里的道路建设,增加365英亩的自然区域以及将主要入口重新定位到River Road。高尔夫球场建筑师给予了极大的关注,以通过设计核心路线并保留沿Bohicket Road沿线增加缓冲液来最大程度地减少树木的去除。整个理由将由基亚瓦岛俱乐部(Kiawah Island Club)管理,包括指定的短期出租区,以确保一致的高质量条件。基于未来房主的预期市场偏好,预计该社区对公共设施和服务的影响最小。以下是对现有和拟议权利之间的关键发展因素的比较,这些因素阐明了查尔斯顿县议会面前的重新分区的减少影响:
VSAT 通信对印度电力系统的适用性
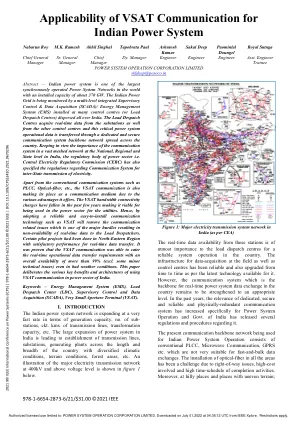
摘要 — 印度电力系统是世界上最大的同步运行电力系统网络之一,装机容量约为 370 GW。印度电网由分布在印度各地的许多控制中心(或负荷调度中心)安装的多级综合监控和数据采集 (SCADA)/ 能源管理系统 (EMS) 监控。负荷调度中心从变电站和其他控制中心获取实时数据,这些关键的电力系统运行数据通过遍布全国的专用安全通信系统骨干网络进行传输。考虑到通信系统在印度国家、地区和州级庞大网状网络中的重要性,电力部门的监管机构,即中央电力监管委员会 (CERC) 也制定了有关州际电力传输通信系统的规定。除了 PLCC、光纤等传统通信系统外,VSAT 通信也因其提供的各种优势而成为一种通信媒介。 VSAT 带宽连接费用在过去几年中有所下降,使其可以在电力部门为公用事业使用。因此,采用可靠且易于安装的通信技术(如 VSAT)将消除通信相关问题,而这些问题是导致负荷调度员无法获得实时数据的主要障碍之一。东北地区已完成某些试点项目,实时数据传输效果令人满意。事实证明,即使在恶劣天气条件下,VSAT 通信也能满足实时运行数据传输要求,总体可用性超过 99%(不包括一些小技术问题)。本文探讨了在印度电力部门使用 VSAT 通信的各种主要优势和架构。关键词 – 能源管理系统 (EMS)、负荷调度中心 (LDC)、监控和数据采集 (SCADA)、甚小孔径终端 (VSAT)。一、引言印度电力系统网络在发电容量、变电站数量、输电线路总长公里数、变电容量等方面都以极快的速度扩张。印度电力系统的大规模扩张导致输电线路、变电站、发电厂的建立遍布全国各地,涉及不同的气候条件、地形条件、森林面积等。图 1 显示了 400kV 及以上电压等级的主要输电网络。

1.0 简介 - 马哈拉施特拉邦污染控制委员会
1.0 引言 空气污染物来自各种来源,它们改变了大气的成分并影响生物环境。空气污染物的浓度不仅取决于空气污染源的排放量,还取决于大气吸收或分散这些排放物的能力。空气污染浓度在空间和时间上有所不同,由于气象和地形条件的变化,空气污染模式会随着不同地点和时间的变化而变化。空气污染物的来源包括车辆、工业、家庭来源和自然来源。由于周围空气中存在大量空气污染物,人口和财产的健康和财产受到不利影响。为了遏制空气质量的恶化,政府。印度于 1981 年颁布了《空气(污染防治)法》。1986 年《环境(保护)法》进一步强调了这一责任。有必要通过持续的空气质量调查/监测计划来评估当前和预期的空气污染。因此,中央污染控制委员会于 1984 年至 1985 年在国家层面启动了国家环境空气质量监测 (NAAQM) 网络。该计划后来更名为国家空气质量监测计划 (NAMP)。本报告介绍了在 NAMP 下开展环境空气质量监测的指南。进行环境空气质量监测是为了生成符合监测目标的数据。需要环境空气质量监测计划来确定现有的空气质量、评估控制计划的有效性并制定新计划。本报告旨在开发更统一的空气监测网络,以便各个站点的数据具有可比性。本报告讨论了空气质量监测网络的各个方面,例如,应监测哪些污染物、应在何处进行监测以及各种监测技术。还讨论了印度开展环境空气质量监测的法律要求。这些要求是确定环境空气质量监测目标的基础。环境空气质量监测网络涉及在该国多个地点测量多种空气污染物,以满足监测目标。。因此,任何空气质量监测网络都涉及污染物的选择、位置的选择、频率、采样持续时间、采样技术、基础设施、人力以及运营和维护成本。网络设计还取决于大气中各种常见来源的污染物类型,称为常见城市空气污染物,例如悬浮颗粒物 (SPM)、可吸入悬浮颗粒物 (RSPM)、二氧化硫 (SO 2 )、氮氧化物 (NOx) 和一氧化碳 (CO) 等。主要选择的区域是交通密度高、工业增长、人口及其分布、排放源、公众投诉(如果有)和土地使用模式等区域。通常,大多数时候网络设计的基础是污染源和存在的污染物。