XiaoMi-AI文件搜索系统
World File Search System地面效应

地面效应模型转子电压下降模拟
旋翼在地面效应 (IGE) 下运行产生的流场复杂且不稳定,还可能与地面相互作用。这种相互作用的结果是旋翼诱导流从垂直 (下洗) 转变为径向流 (外洗)。由于高流出速度产生的力量,该流场可能成为地面人员、设备和景观的风险源。此外,在出现降水或白化的情况下,流场可能与松散的沉积床相互作用,将飞机周围的颗粒物抬升。预测外洗对于直升机 IGE 操作的安全至关重要。降水通常会影响飞机正下方的活动(如搜索和救援行动),而外洗会在着陆和起飞期间影响周围环境,如人员、设备和结构。如前所述,当旋翼机在地面附近运行时,可能会发生降水和白化,这是由于旋翼尾流与松散沉积床的颗粒(如沙子、雪等)相互作用造成的。这种相互作用最终可能导致颗粒物从地面升起并被夹带进气流中。在沙漠地区或雪地中飞行时,旋翼机周围夹带的颗粒数量可能会非常多,形成云状。这种在飞机周围移动的颗粒云主要影响飞行员的视觉

地面效应中旋翼的安全性分析
在本研究中,计算流体动力学用于对在地面效应下运行的转子进行安全性分析。首先,本文重点关注对微转子在不同地面高度运行产生的流出物的评估和预测。将时间平均流出速度与实验结果进行比较。然后,使用 PAXman 模型和粒子跟踪方法对模拟流场进行安全性研究。研究了飞机重量,评估了比例因子以确定直升机重量如何影响流出力和粒子路径。结果表明,较重的直升机产生的尾流会对地面人员产生更大的力,并将粒子推离转子更远。此外,地面和转子之间的距离会影响粒子路径,为机组人员和地面人员产生不同的危险情况。
图-144超音速运输机的地面效应特性
为了加深对此类飞行器地面效应现象的了解,我们通过飞行和地面试验获得了 Tu-144 超音速运输机的地面效应特性。飞行试验计划包括在下降飞行机动过程中获得的动态测量值和在跑道上平飞机动过程中获得的稳态测量值。我们利用 NASA 兰利研究中心 14 英尺 x 22 英尺亚音速风洞中的开发模型支持系统,为 Tu-144 的简单平面模型获取了动态和稳态风洞试验数据。我们还提供了 Tu-144 稳态全配置风洞试验数据。我们将实验方法的结果与简单计算方法(面板理论)的结果进行了比较。结果表明,幂律关系可以有效拟合所有数据集的升力随离地高度的变化。我们已使用组合数据集来评估测试技术并评估地面效应对各种参数的敏感性。机身、起落架、鸭翼和发动机气流等配置细节对各种数据集之间的相关性影响不大。没有发现任何明显的趋势与飞行路径角度或下降率有关。

低速风洞测试及数据校正...
图 1-1:静态地面效应测试 ............................................................................................................................................................. 10 图 1-2:静态地面效应测试,模型调整 ............................................................................................................................................. 11 图 1-3:堪萨斯大学研究中心进行的动态地面效应测试 ............................................................................................. 11 图 1-4:堪萨斯大学研究中心用于动态地面效应测试的装置 ............................................................................. /2 图 1-5:兰利涡旋研究设施图 ............................................................................................................................................. /3 图 1-6:VRF 中使用的倾斜接地板图 ............................................................................................................................. 13 图 2-1:地面效应中的 ~Ving ............................................................................................................................................................. . 17 图 2-2:模型尺寸 ................................................................................................................................................................ 19 图 2-3:边界层消除系统 ................................................................................................
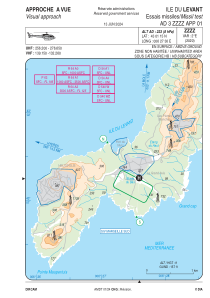
ILE DU LEVANT 导弹试验/导弹试验 AD 3 ZZZZ APP 01
特殊程序和说明 由于停在斜坡上,禁止旋翼滑行 优先 QFU 11:由于雷达发射 任何类型的高能激光都不能直接抵达点和加油区 任何类型的高能激光都可以在跑道上产生地面效应移动 最大重量 > 6000 公斤的重型高能激光(NH 90、虎式、美洲豹、美洲狮、狞猫等)只能通过牵引才能进入点 3 加油区和机库通过牵引(或通过轻型高能激光的地面效应) 直升机场未配备抓取装置 N 和 S 入口点:在 600 英尺 AMSL 处整合跑道电路

格尼襟翼及其对机翼影响的研究 - SOAR
1. 介绍 ................................................................................................................ 1 1.1 背景 ...................................................................................................... 1 1.2 目标 .............................................................................................................. 2 2. 文献背景研究 .............................................................................................. 4 2.1 地面效应 ...................................................................................................... 4 2.2 Gurney 襟翼 ............................................................................................. 5 2.3 对比和比较 ............................................................................................. 8 3. 计算机程序 ...................................................................................................... 10 3.1 背景 ...................................................................................................... 10 3.2 XFoil ...................................................................................................... 11 3.3 JavaFoil ................................................................................................ 11 3.3.1 JavaFoil 背景 ............................................................................. 11 3.3.2 JavaFoil 和地面效应 ............................................................................. 12 3.3.3 JavaFoil 和 Gurney 襟翼的增加 ............................................................. 20 3.4 比较 XFoil 和 JavaFoil ...................................................................... 23 3.5 结合地面效应和 Gurney 襟翼 .............................................................. 24 4. 实验研究 ...................................................................................................... 26 4.1 概述 ...................................................................................................... 26 4.2 WSU 3×4 英尺风洞 ............................................................................. 26 4.3 二维测试 ............................................................................................. 27 4.4 模型 ...................................................................................................... 27 4.5 测试矩阵 ............................................................................................. 28 4.6 预期气动力 ............................................................................................. 29 4.7 预期不确定性或误差 ............................................................................. 31 4.7.1 施工误差 ............................................................................................. 32 4.7.2 风洞阻塞误差 ............................................................................. 32 4.7.3 安装误差................................................................................ 32

A380:飞行控制的发展 | 安全第一 | 空中客车
这要归功于风洞测试。这样就可以准备计算机的第一个版本。下一步是将这些计算机安装在集成了最新空气动力学模型的模拟器上。可以开始评估,首先由专门从事这项工作的“开发模拟器”飞行员进行,然后由被提名遵循该计划的试飞员进行。一开始,会发现许多小问题,并且计算机会逐步发展。真正的证明来自试飞本身,因为即使模型通常是可靠的,但它们很少能完全代表飞机在低速、高速和地面效应下的表现。此外,在飞行测试开始时,飞行员第一次接触到飞机响应其指令的加速度。结构的灵活性可能会产生后果
A380:飞行控制系统的发展 | 安全第一 | 空中客车
由于风洞测试,计算机的第一个版本已经准备就绪。下一步是将这些计算机安装在集成了最新空气动力学模型的模拟器上。评估可以开始,首先由专门从事这项工作的“开发模拟器”飞行员进行,然后由被提名按照程序进行的测试飞行员进行。一开始,会发现许多小问题,然后计算机会逐步改进。真正的证明来自试飞本身,因为即使模型通常是可靠的,它们也很少能完全代表飞机在低速、高速和地面效应下的状态。此外,在飞行测试开始时,飞行员第一次接触到飞机响应其指令的加速度。结构的灵活性可能会产生后果

使用 X-Plane 进行 VTOL-UAV 飞行员训练的 HIL 飞行模拟器
摘要:随着垂直起降无人机(VTOL UAV)的日益普及,一个新的问题出现了:飞行员训练。大多数传统的飞行员训练模拟器都是为全尺寸飞机设计的,而大多数无人机模拟器仅专注于概念测试和设计验证。X-Plane飞行模拟器进行了扩展,包括复杂的风动力学、地面效应和准确的实时天气等新功能。商用HIL飞行控制器与VTOL垂直起降飞机无人机模型相结合,以提供逼真的飞行控制。在模拟中测试了一个真实的飞行案例场景,以显示包含精确的风模型的重要性。结果是一个完整的模拟环境,已成功部署用于FuVeX制造的Marvin飞机的飞行员训练。