XiaoMi-AI文件搜索系统
World File Search System地面杂波
短程防空(SHORAD)白皮书
目前,雷达传感器面临的最大威胁是低速、低速、雷达截面较小的无人机(“低、慢、小 - LSS”)。这些无人机往往在存在地面杂波和降水杂波的区域运行。高速飞行的飞机和导弹在多普勒空间中与这种杂波很好地分离,但速度慢、雷达截面小的无人机很难在杂波中被发现和识别。需要多普勒滤波来抑制地面杂波并实现无人机检测。由于无人机速度相对较慢,并且在存在杂波的地方运行,因此过滤地面杂波和雨水变得更加困难。需要非常精细的多普勒分辨率才能将速度非常慢的无人机与杂波分离,以便检测到它们,这需要相对较高的脉冲重复频率 (PRF) 和相干处理间隔 (CPI) 内的大量脉冲的组合。这很难通过中长距离雷达实现。这些是管理近距防空雷达所用雷达的时间能量预算的关键因素。无人机(尤其是旋翼无人机)的特性会影响检测,例如,旋翼会产生与身体回波完全分离的多普勒边带,即使无人机悬停或与雷达相切飞行,这些边带也可用于检测目标而不是身体回波。

优雅降级:机载监视雷达...
基于有源电子扫描天线 (AESA) 的雷达具有“优雅降级”这一理想特性。此类雷达使用小型化发射-接收 (TR) 模块,少数模块故障不会导致任务失败。例如,在基于 AESA 的地面 MTI 雷达中,少数模块故障不会影响阵列性能。在这种情况下,静态地面杂波以零频率为中心,没有与运动相关的多普勒频移。然而,在机载 AESA 雷达中,由于平台运动和杂波通过天线旁瓣泄漏,地面杂波具有与角度相关的多普勒频率。因此,天线旁瓣电平决定了要针对其执行目标检测的旁瓣杂波。检测性能受信号与干扰加噪声比 (SINR) 控制。对于机载监视雷达,TR 模块的随机和系统故障及其对 SINR 的影响是特征化的。结果表明,单通道处理不能有效地提供平滑降级功能,因为故障导致的 SINR 损失很大。但是,与随机故障相比,系统故障对 SINR 损失的影响较小。还提出了一种有效的阵列馈电方案。
Sum07_将 Avian 雷达整合到海军行动中
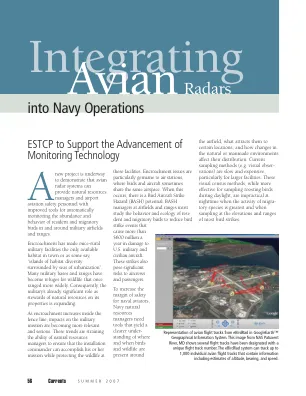
2000 财政年度,美国国防部 (DoD) 遗产计划办公室为南卡罗来纳州克莱姆森大学雷达鸟类学实验室 (CUROL) 提供了资金,以开发一种能够探测机场鸟类的鸟类雷达系统,从而减少鸟击的发生。最初的 BirdRad 系统旨在成为一种廉价的移动式鸟类雷达。它包括一个低成本的商用海事雷达,配备 4 度波束宽度抛物面天线(以获得更好的高度分辨率)和一台台式个人计算机,用于在图形文件中显示和捕获雷达图像。CUROL 建造了五个 BirdRad 系统,部署在三个海军、一个海军陆战队和一个空军基地。虽然 BirdRad 在探测零到六海里范围内的鸟类方面非常有效,但它有几个局限性。主要是来自静止物体(“地面杂波”)的雷达回波会遮挡移动目标;从屏幕截图中提取目标轨迹太慢并且需要大量劳动力,无法追踪许多种类的鸟类;并且很难将屏幕上的目标与周围的景观联系起来。
章节内容 - WMO 图书馆
图 7.1 显示了典型的雷达和雷达站点。天线(2-8.5 米)位于塔顶的天线罩内,塔高约 10-30 米或更高。塔用于将天线抬高到当地障碍物之上。确定塔高时,应考虑附近树木的生长情况。塔太高会导致主瓣和旁瓣的侧面产生更多的地面杂波。其中一栋建筑包含雷达电子设备(发射器/接收器和计算机),另一栋建筑包含不间断电源 (UPS) 和柴油发电机。雷达通常位于农村地区,良好的电源条件往往不是常态。UPS 在消除电源尖峰和其他异常方面起着关键作用,是维持运行的关键。柴油发电机或其他类型的发电机可以运行 2-3 天,但应根据需要指定。请注意,机罩顶部的避雷针与接地电缆(未显示)相连。这很关键,因为雷电会对雷达组件造成严重和长期的损坏。雷电引起的功率波动可能超出 UPS 的能力。还要注意机罩顶部用于警告飞行员的红色信号灯。
监视比较指导材料... - ICAO
优势 o PSR 不需要在飞机上安装或操作应答器,从而可以检测和管理未装备/故障的飞机或不合作的飞机 1 o 如果需要显示天气,可以提供天气通道输出。 o 非常适合机场地面监视 弱点 o PSR 不提供身份 o 不提供高度 2 o 位置基于斜距测量而不是真实距离(这给多雷达跟踪系统带来一些困难) o 经常会报告假目标(地面车辆、天气、鸟类等) o 在存在地面和天气杂波的情况下检测性能较差,特别是对于与雷达切向的飞行 o 与二次监视雷达 (SSR) 相比价格昂贵 o 更新率在 4 到 12 秒之间(比典型的多点定位或 ADS-B 长) o 长距离性能需要高发射机功率 - 带来干扰和环境问题 o 系统的安装和维护成本非常高 o 系统需要最佳位置,视野开阔,雷达可见的地面杂波最少 o 由于方位角分辨率性能差,无法分辨相同范围内相似位置的两架飞机。