XiaoMi-AI文件搜索系统
World File Search System多光谱

机载多光谱图像序列的自动配准和镶嵌
摘要 机载遥感由于系统部署的灵活性而在农业监测中具有重要的应用。实际应用中的主要障碍是其高成本。为了降低成本,可以使用小型空中平台(例如微型无人机(mini-UAV))上的单个相机来组装多光谱系统。在这种情况下,即使经过仔细调整,相机仍可能存在移位和旋转错位。平台飞行时会捕获连续的帧。因此,在生成任何商业产品以支持实际决策之前,必须进行单帧内的多波段配准和帧间镶嵌以获得整个监测区域的联合配准多光谱图像。在本文中,我们提出了实现此目标的自动算法。这些算法对于没有明显特征的图像场景特别有用。自动和手动评估均证实了所开发的算法在整体平坦地形无明显特征的多传感器数据融合中的有效性。


多光谱图像的迭代多尺度融合与夜视彩色化
1.引言多光谱图像通常提供互补信息,如可见光波段图像和红外图像(近红外或长波红外)。有强有力的证据表明,融合的多光谱图像提高了解释的可靠性(Rogers & Wood,1990;Essock 等人,2001);而彩色多光谱图像则提高了观察者的表现和反应时间(Toet 等人,1997;Varga,1999;Waxman 等人,1996)。计算机可以自动分析灰度融合图像(用于目标识别);而彩色图像则易于人类用户解释(用于视觉分析)。想象一下,夜间导航任务可以由配备多传感器成像系统的飞机执行。分析组合或合成的多传感器数据将比同时监测多光谱图像(如可见光波段图像(例如,图像增强,ll)、近红外(NlR)图像和红外(lR)图像)更方便、更有效。在本章中,我们将讨论如何使用图像融合和夜视彩色化技术合成多传感器数据,以提高多传感器图像的有效性和实用性。预计这种图像合成方法的成功应用将提高遥感、夜间导航、目标检测和态势感知的性能。这种图像合成方法涉及两种主要技术,即图像融合和夜视彩色化,分别在下面进行回顾。图像融合通过整合互补数据来组合多源图像,以增强各个源图像中明显的信息,并提高解释的可靠性。这样可以得到更准确的数据(Keys et al.,1990)并提高实用性(Rogers & Wood,1990;Essock et al.,1999)。此外,据报道,融合数据提供了更为稳健的操作性能,例如增加了置信度、减少了歧义性、提高了可靠性和改进了分类(Rogers & Wood,1990;Essock et al.,2001)。图像融合的一般框架可以在参考文献(Pohl & Genderen,1998)中找到。在本章中,我们的讨论重点是像素级图像融合。对融合图像质量的定量评估对于客观比较各个融合算法非常重要,它可以测量有用信息的数量和融合图像中引入的伪影数量。

通过同时多光谱光声波动成像(MS-PAFI)和超声多普勒
我们提出了一种方法和设置,可提供血液氧合(通过定量光声成像)和血流动力学(通过超声多普勒)的互补三维(3D)图像。所提出的方法不含标签,利用了血液诱导的波动,并在仅有256个元素的稀疏阵列上实施,并以市售的超声电子功能驱动。我们首先实施3D光声波动成像(PAFI)来对鸡胚胎进行图像,并获得血管形态的全部视频图像。我们同时获得具有可比图像质量的3D超声功率多普勒。然后,我们引入了多光谱光声波动成像(MS-PAFI),并证明它可以提供吸收的光学能量密度的定量测量,并具有完全可见性和增强的对比度,与常规的延迟延迟式延迟式多光谱摄影成像相比。我们最终展示了MS-PAFI之间的协同作用和互补性,该MS-PAFI提供了3D定量氧合(SO 2)成像和3D超声多普勒,该成像提供了有关血流动力学的定量信息。MS-PAFI代表了基于模型的反转的有希望的替代方案,其优势是通过使用直接处理方案解决所有可见性人工制品而没有事先和正则化。

机载多光谱图像在害虫管理中的应用...
机载多光谱图像在害虫管理系统中的应用 Y. Huang、Y. Lan 和 W.C. Hoffmann USDA-ARS,APMRU 2771 F&B Road College Station,TX,77845 电子邮件:yhuang@sparc.usda.gov 摘要 开发并测试了一种用于农业飞机的多光谱成像系统,以提供田地图像并帮助农民和作物顾问管理农业用地。这项研究的结果表明,机载 MS4100 多光谱成像系统在区域性害虫管理系统中具有巨大应用潜力,例如杂草控制或昆虫危害检测。多光谱图像处理可产生 NIR、红色、绿色、NR、NG、NDVI 和 NDNG 指数或图像,可用于评估农田中的生物量、作物健康、生物型和害虫侵染。分类后的图像通过区分图像中光谱特征的变化来识别地面覆盖簇。图像分类的结果可以提供关键输入,以生成用于精准应用作物生产和保护材料的处方数据。

糖尿病黄斑缺血的基于图神经网络的多光谱学习模型
图4病例和亚组分析。a。 CFP和OCTA的图像代表性眼睛的图像。预测是由人类分级器(具有10年经验的眼科医生3)和GNN-MSVL模型(具有跳线n = 2)做出的。左:DMI阳性的眼睛,人类分级器和模型都正确预测了结果;中间:DMI阳性的眼睛,其中人类级别做出了错误的预测,而模型的预测是正确的;右:DMI阴性的眼睛和模型都正确地预测了结果。b。测试数据集中的DR分级和DMI存在。c。 GNN-MSVL模型(跳线n = 2)在不同的DR严重程度上进行的预测准确性。d。 GNN-MSVL模型(跳线n = 2)的示例DMI眼的CFP和OCTA图像做出了正确的预测。比例尺:0.5mm。
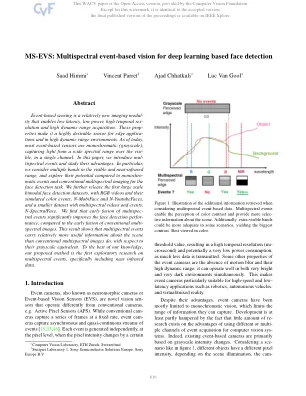
MS-EVS:基于多光谱事件的基于深度学习的面部检测的愿景
基于事件的传感是一种相对较新的成像模态,可实现低潜伏期,低功率,高时间分解和高动态范围采集。这些支持使其成为边缘应用和在高动态范围环境中的高度可取的传感器。截至今天,大多数基于事件的传感器都是单色的(灰度),在单个通道中捕获了Visi-ble上广泛光谱范围的光。在本文中,我们介绍了穆斯特朗事件并研究了它们的优势。尤其是我们在可见范围内和近红外范围内考虑多个频段,并探索与单色事件和用于面部检测任务的传统多光谱成像相比的潜力。我们进一步发布了第一个大型双峰面检测数据集,其中包含RGB视频及其模拟色彩事件,N-Mobiface和N-Youtubefaces,以及带有多光谱视频和事件的较小数据集,N-SpectralFace。与常规多频谱图像的早期融合相比,多阶段事件的早期融合可显着改善面部检测性能。此结果表明,相对于灰度等效物,多光谱事件比传统的多光谱图像具有相对有用的有关场景的信息。据我们所知,我们提出的方法是关于多光谱事件的首次探索性研究,特别是包括近红外数据。

通过高分辨率同轴多光谱成像在激光粉末床融合
本研究提出了一种对激光粉末融合的原位监测方法。使用标准的激光光学元件,在瞄准前扫描配置中获得了粉末床的同轴高分辨率多光谱图像。可以生成整个114×114 mm粉末床的连续概述图像,检测到直径低至20 µm的物体,最大偏移量为22-49 µm。通过从405 nm到850 nm的6个不同波长捕获图像来获得多光谱信息。与已建立方法的吸光度光谱相比,这允许在线确定粉末床的吸光度,最大偏差为2.5%。对于此方法的资格,已经在粉末表面和20种不同粉末的测试上进行射线追踪模拟。这些包括不同的颗粒大小,年龄和氧化粉末。

在密集标记的多光谱brainbow图像中无监督的神经跟踪
成像技术的最新进展,用于产生大量高分辨率3D图像,尤其是Brainbow等多型标记技术,允许在密集的大脑中对邻近神经元的不良分化。这首先可以从光学显微镜图像中研究许多神经元之间的连通性。但是,缺乏可靠的自动化神经形态重建,使数据分析成为提取神经科学中丰富信息学的瓶颈。已经提出了基于超级氧基的神经元分割方法来解决此问题,但是,在最终分割中出现的大量错误阻碍了先前的方法。在本文中,我们提出了一种新型的无监督方法来追踪来自多光谱脑弓图像的神经元,该方法防止了分割误差并使用两种创新来追踪连续性误差:首先,我们采取了基于高斯混合模型的聚类策略,以改善为下一步骨骼提供准确的分离色的色彩通道。然后,提出了一种骨架图方法,以允许神经元树拓扑中的不连续性识别和区域。我们发现,这些创新可以比当前的最新方法更好地表现,从而导致更准确的神经元追踪结果接近人类专家注释。

CCSDS 无损多光谱和高光谱卫星图像压缩标准的实施
本文介绍了符合空间数据系统咨询委员会 (CCSDS) 121.0-B-2 和 CCSDS 123.0-B-1 无损卫星图像压缩标准的两个知识产权 (IP) 核的建模、设计和实现。CCSDS 121.0-B-2 描述了一种基于 Rice 自适应编码的无损通用压缩器。CCSDS 123.0-B-1 标准描述了一种专为高效机载高光谱和多光谱图像压缩而设计的无损算法,它基于预测和基于熵的编码结构。后者提供了两种选项:样本自适应和块自适应编码器,对应于 CCSDS 121.0-B-2 算法。这些 IP 核被设计为独立的压缩器,但由于专用接口,它们可以轻松地以即插即用的方式组合在一起使用。此外,还提供了用于配置和外部存储器访问的标准接口。设计过程包括考虑几种不同的硬件架构,以便同时最大化吞吐量并优化机载资源的要求。这两个 IP 都符合标准中考虑的高可配置性。获得的 VHDL 代码完全独立于技术,因此可用于针对太空环境中感兴趣的任何现场可编程门阵列 (FPGA) 或 ASIC,旨在在卫星中高效执行压缩,尽管固有的