XiaoMi-AI文件搜索系统
World File Search System实时运行

欺诈预测和智能信用卡的验证...
摘要本研究揭示了一种智能信用卡欺诈检测和验证的有力方法。此系统使用混合模型集成了数据预处理,功能工程和实时预测,该模型结合了监督的机器学习算法,编码器和LSTM网络。有监督的LSTM网络分类交易,而无监督的自动编码器会发现异常值。评估标准在召回和准确性之间取得了平衡。警报是在检测欺诈时由系统发送的,并实时运行。合规性,可伸缩性和恒定监视是关键点。为了缩小当代货币交易中的易于安全性和安全性之间的差距,该项目提供了一种最先进的方法来增强智能信用卡的安全性。关键字:LSTM,自动编码器,异常I.引入智能信用卡的介绍,一个新的无摩擦和快速货币交易的时代已经开始。这些高度发展的支付系统的使用简化了消费者和企业的日常财务交易。但是,随着智能信用卡的扩散,一种新的且存在的危险是一种新的危险:信用卡盗窃。犯罪分子用来利用系统中漏洞的不断发展的方法使打击信用卡盗窃成为巨大的问题。成功应对这种威胁需要开发新颖而灵活的解决方案。这项研究通过引入彻底的方法是智能信用卡欺诈预测和使用混合机器学习验证来解决这一紧急要求。首先收集和预处理包括各种智能信用卡交易的广泛数据集,作为该项目多面方法的一部分。数据集包含有效和欺诈性交易,使其成为建筑模型的宝贵资源。无监督的自动编码器神经网络是本研究的关键组成部分,因为它检测到交易数据中的异常值的程度。使用自动编码器的编码器组件来学习潜在特征,即使不是立即明显,此方法也可以识别欺诈。在研究中使用了包括LSTM网络(适合序列数据的LSTM网络)的监督机器学习方法,以提高预测准确性。为了提高模型区分实际和欺诈交易的能力,使用

机器人清洁或干洗机器人的缺点
I.引言由于气候变化和全球变暖对我们星球的未来构成了威胁,因此找到满足我们能源需求的环境有益的替代方案比以往任何时候都重要。太阳能产生的动力是最有效的清洁,可再生能源之一。太阳面板使用太阳能量发电。太阳能电池板是最便宜,最低的维护方法,因为它们没有任何活动部件。参考[4]对太阳能电池板效率进行了研究,该研究量化了太阳能电池板在其理论最大效率方面产生的功率。该研究测试了在各种设置中的太阳能电池板的清洁度和跟踪机制,包括固定,清洁,肮脏和固定,肮脏和跟踪以及清洁和跟踪。已经证明,即使通过集成的阳光跟踪,太阳能电池板表面上的灰尘收集也会降低其效率。光传输速率的提高提高了清洁的太阳能电池板的效率[5]。与保持太阳能电池板静止和清洁相比,跟踪它可能会导致效率损失高达50%。大规模发电厂由于太阳能电池板上的尘埃堆积而更频繁地损失兆瓦[6]。能力下降1%可能会对内部收益率(IRR)产生重大影响。相比之下,低水平的尘埃堆积可能不会对小太阳能电厂产生负面影响[7]。在能源行业中,光伏(PV)是一种新技术,可将太阳辐照度(来自太阳的辐射能量转换为电力)。在这里,光伏细胞取下了太阳发出的光子中包含的能量,并将其转化为可用的能量。能源行业已经进行了根本性的转变,因为对PV技术,这使得全球有可能朝着更可持续的能源实践迈进[1,2]。这为光伏部门打开了大门,以便在较早的时候取得巨大的工业进步,并且随着技术的发展而继续这样做。,如果他们遵循实验室规模模型,实验规模模型和当前的PV业务实时运行发电厂的开发,则可以观察到技术的重大进步。为了解决负载中心本身能源需求的问题,并最大程度地减少了对延长传输和分配的需求,这些PV技术已经出现并成为许多其他部门的关键组成部分。商业光伏技术开发导致了大型公用事业或多兆瓦电源设施的创建。实用程序
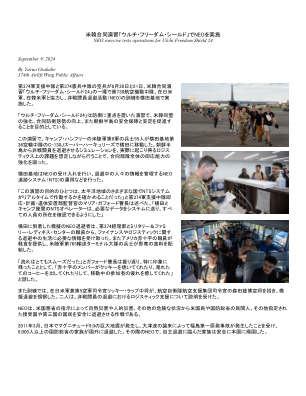
NEO 在美韩联合演习“乙支自由之盾”期间进行
2024年9月9日 作者:大阪部康夫 第374空运联队公共事务部第374军事支援连和第374宪兵连的飞行员参加了8月20日至21日举行的美韩联合演习“乙支自由之盾24”。美国第 730 空中机动中队与军方和驻韩美军合作,在横田空军基地进行了非战斗人员撤离行动(NEO)训练。乌鲁奇自由之盾24演习是一项以防御为重点的演习,旨在加强美韩同盟,改善联合防御态势,促进朝鲜半岛的安全与稳定。 为了这次演习,来自汉弗莱营的美国陆军第 8 集团军的 55 名士兵乘坐 C-130J 超级大力士从横田空军基地第 36 空运中队前往横田。通过模拟非战斗人员从朝鲜半岛的撤离,同时想象实际可能发生的后勤挑战,我们的目的是加强整个联合部队的战备状态。 横田空军基地接受近地天体并运行近地天体跟踪系统(NTS),该系统管理疏散人员的信息。 “这次演习的目标之一是测试 NTS 系统在太平洋地区各国的实时运行情况,”第 374 部队支援中队战备、计划和太平间部门主管玛丽亚·加福德 (Maria Gafford) 中士说。 “横田和座间营地的 NTS 操作员将必要的数据输入系统,使我们能够确认所有人员的下落。”我们从李战备中心工作人员那里收到了疏散期间生活所需的财务和后勤信息。美国红十字会人员还提供了茶点,美国陆军第 765 运输站营的士兵分发了临时食品。 “整个流程非常顺利,”加福德中士回忆道,并补充说,让他印象特别深刻的一件事是,“红十字会成员在我们移动时为我们烤饼干,并为我们提供现煮的咖啡,缓解了参与者的疲劳。” ”。 演习期间,驻日美军司令兼第五航空队司令拉普中将还邀请航空自卫队空中支援大队司令森田武大将观摩模拟撤离。两人听取了有关非战斗人员撤离后勤支持的情况通报。 NEO 是由美国国务院指导的一项行动,旨在安全疏散美国公民、国防部平民以及其他指定东道国和第三国的国民,使其免受自然灾害、人为灾害或其他危险情况的影响。 2011年3月,日本发生9.0级大地震,随后引发大规模海啸,引发福岛第一核电站事故,超过9000名国防部家属从日本撤离。当时因NEO而自愿撤离的家属已安全返回祖国。
navila_paper.pdf
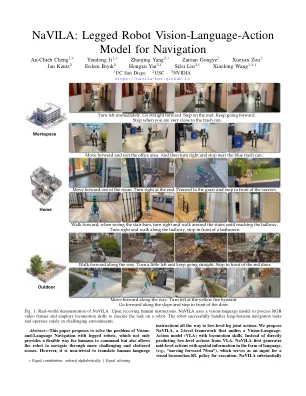
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许

使用机器学习对小胶质细胞进行分类
项目详情:机器学习:通常,只需根据生物细胞的形状即可预测其状态。人类尝试这样做既耗时又容易受到无意识偏见和人为错误的影响。相反,人们更喜欢自动计算方法,而这正是机器学习可以实现的。我们的初步结果已经开发出一种高精度(>93%)的小胶质细胞方法。这篇博士论文的目的是改善这一点。应用:小胶质细胞是大脑中的常驻免疫细胞。它们采用多种表型来控制大脑的免疫反应,包括吞噬有害物质和释放信号化学物质。科学界在过去五十年中天真地将小胶质细胞分为两种类型。然而,最近的研究(包括我们的合作者)带来了革命性的想法,即小胶质细胞状态是一个连续体。重要性:拥有一种可以准确确定小胶质细胞状态的诊断工具至关重要。首先,小胶质细胞在抑郁症和精神分裂症等精神健康状况中起着至关重要的作用。其次,小胶质细胞在神经退行性疾病(包括运动神经元、帕金森氏症和阿尔茨海默氏症)中很重要。第三,这种工具可用于脑外科手术期间,以持续监测脑细胞状况。第四,这项工作可以扩展到其他巨噬细胞,如肺部的肺泡巨噬细胞。 项目关键目标:(1)开发一种机器学习方法来自动分类小胶质细胞状态(2)确定该方法如何依赖于图像大小、成像条件和不完善的训练数据(3)优化该方法以实时运行并同时在多个细胞上运行 方法:这项博士学位将利用我们与 Kate Harris 博士(纽卡斯尔)、Ian Wood 教授(利兹)和 Andrew Dick 教授(布里斯托尔)合作提供的机会。它将采用一种真正的多学科方法研究小胶质细胞状态,包括机器学习、图像分析和延时成像。这将使学生学习到非常理想的定量和实验技能组合,从而为未来的职业前景带来良好的前景。项目计划:(1)创建新的机器学习方法,特别是卷积神经网络(CNN),使用我们现有的 >20,000 个小胶质细胞的大型数据集自动对小胶质细胞状态进行分类。这将涉及探索多个数据集和 CNN 架构(VGG-16、ResNet、Inception、Xception、DenseNet、ResNeXt-50)。(2)设计图像分析软件,自动从原始显微镜图像中分割细胞。这将基于我们小组现有的代码,并将为机器学习生成输入数据。相关技术将包括形态学操作、边缘检测、距离变换和分水岭变换。(3)培养和成像人类小胶质细胞 HMC3 细胞系,以生成更多数据用于训练 CNN 并测试机器学习模型的准确性。细胞
实时系统运营中的人工智能和机器学习白皮书 – 2024 年 11 月第 1 版
虽然人工智能 (AI)、机器学习 (ML) 和数据科学已经研究和开发了几十年,但技术发展和公众关注度最近激增。这导致市场上出现了大量的研究和新解决方案,影响到工作和个人生活的几乎每个方面。随着人们的兴趣不断增长以及投资和研究扩展到新领域,创新和讨论继续迅速发展。在实时电力运营领域,人们也认识到由于不断发生的变化,BPS 的复杂性和复杂性不断增加,其中有几个新的用例扩展了系统的假设(例如,对网络方面的担忧日益增加、过量的太阳能流入输电系统、电动汽车充电的负载显着增长、AI/ML 的功率需求不断增长、区块链上的加密货币挖掘和其他数据中心运营)。BPS 是北美能源基础设施的支柱。它对整个大陆和国家的安全和经济稳定都至关重要,并支撑着我们的日常生活。管理系统的实时可靠性需要控制室操作员拥有不断提高的认知、注意力、警惕性、知识和抽象推理水平,这必然会导致许多人考虑新的 AI/ML 解决方案。由于 BPS 是地球上最复杂的社会技术系统(涉及复杂人类和复杂系统以及它们之间复杂交互的系统),因此需要考虑许多因素以尽量减少系统风险。本文档旨在供决策者、监管者和这些技术的最终用户使用,特别是在实时操作中。断言这些技术是否应该用于实时操作是没有用的,因为对整个行业主要利益相关者的调查和访谈表明,这种情况已经发生了。“精灵”无法被放回瓶子里(本文档并未断言应该这样做)。相反,本文档提供了有关人们应该询问这些技术的问题类型的指导,以彻底了解它们的能力以及正确实施它们需要进行哪些类型的更改。以前进入市场的技术已经陷入了典型的模式,导致最初的“坎坷”实施,出现意外风险或不良事件。本文档提供了实时操作的途径(在这种操作中,此类不良事件是无法容忍的),旨在确保能够以最大程度地提高成功部署和可靠性的方式实施 AI/ML 技术。业界已经认识到,许多组织已经在考虑 AI/ML 应用,并做出了各种决定,积极尝试避免这些应用(例如,人工智能从传统的机器学习方法(例如,阻止工作计算机访问生成式预训练变压器 (GPT) 并制定有关信息安全的政策)转变为拥抱它们(例如,利用更好的客户呼叫跟踪、确保加强资产健康以及预测实时运行参数,如风力发电、太阳能发电和负载)。现在和未来的 AI/ML 技术的表面积非常巨大。本文档重点介绍当前可用的技术,这些技术是为处理特定情况而构建、训练和部署的,不能在其训练领域之外工作(例如,不能依赖太阳能发电预测器来预测风力发电),通常称为狭义人工智能(或有时称为弱人工智能)。这包括最近快速增长的领域,包括生成新内容的能力(使用 GPT 等生成式人工智能算法)。
![初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、](/simg/4\4b79ebb2e692147077c5f05290fe6b1288b2aad1.png)
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、
初步沟通 基于人工智能的车载自动列车障碍物距离估计 Ivan ĆIRIĆ*、Milan PAVLOVIĆ、Milan BANIĆ、Miloš SIMONOVIĆ、Vlastimir NIKOLIĆ 摘要:本文提出了一种新方法,利用图像平面单应性矩阵来改进对摄像机和成像物体之间距离的估计。该方法利用两个平面(图像平面和铁轨平面)之间的单应性矩阵和一个人工神经网络,可根据收集的实验数据减少估计误差。SMART 多传感器车载障碍物检测系统有 3 个视觉传感器——一个 RGB 摄像机、一个热成像摄像机和一个夜视摄像机,以实现更高的可靠性和稳健性。虽然本文提出的方法适用于每个视觉传感器,但所提出的方法是在热成像摄像机和能见度受损场景下进行测试的。估计距离的验证是根据从摄像机支架到实验中涉及的物体(人)的实际测量距离进行的。距离估计的最大误差为 2%,并且所提出的 AI 系统可以在能见度受损的情况下提供可靠的距离估计。 关键词:人工神经网络;自动列车运行;距离估计;单应性;图像处理;机器视觉 1 简介 通过遵循自动化趋势,可以大大提高铁路货运的质量和成本竞争力,以实现经济高效、灵活和有吸引力的服务。今天,自动化和自主操作已经在公路、航空和海运中变得普遍。现代港口拥有自动导引车 (AGV),可将集装箱从起重机运送到轨道旁、仓库、配送中心,而自动驾驶仪是航空公司和大型货船的标准配置,不需要大量机上人员。自动驾驶汽车和卡车的发展已经进入了一个严肃的阶段。此外,轨道交通自主系统的发展主要出现在公共交通服务领域(无人驾驶地铁线路、轻轨交通 (LRT)、旅客捷运系统和自动引导交通 (AGT))。基本思想是使用一定程度的自动化,将操作任务从驾驶员转移到列车控制系统(例如 ERTMS)。根据国际电工委员会 (IEC) 标准 62290-1,列车自主运行 (ATO) 是高度自动化系统的一部分,减少了驾驶员的监督 [1]。对于完全自主的列车运行,列车操作员的所有活动和职责都需要由多个系统接管,这些系统可以感知环境并俯瞰现场,检测列车路径上的潜在危险物体并做出相应的正确反应 [2-6]。障碍物检测系统作为 ATO 系统的主要部分,障碍物检测系统需要根据货运特定和一般用例(例如 EN62267 和/或自动化领域的相关项目)来监控环境。为了满足严格的铁路标准和法规,障碍物检测系统 (ODS) 应在具有挑战性的环境和恶劣的能见度条件下工作。ODS 是一种具有硬件和软件解决方案的机器视觉系统(图 1),用于提供有关铁路上和/或其附近障碍物的可靠信息,并估算从系统到检测到的障碍物的距离 [7]。该系统需要实时运行,并在不同的光照条件下运行(白天、

闭环实时深度网络推理平台……
† 同等贡献。*1760 Haygood Dr NE,亚特兰大,佐治亚州,美国。电子邮件:chethan [at] gatech.edu。简介:闭环实验是脑机接口 (BCI) 研究的关键组成部分。人工神经网络 (ANN) 是用于建模和解码神经活动的最先进的工具,但将其部署到闭环实验中却具有挑战性。研究人员需要一个框架,该框架既支持用于运行 ANN 的高级编程语言(例如 Python 和 Julia),又支持对低延迟数据采集和处理至关重要的语言(例如 C 和 C++)。为了满足这些需求,我们推出了 BRAND 实时异步神经解码系统 (BRAND)。材料、方法和结果:BRAND 可以在几乎任何标准 Linux 计算机上运行,并且由称为节点的进程组成,它们通过图中的数据流相互通信。BRAND 支持微秒精度的可靠实时执行,使其成为闭环神经科学和神经工程应用的理想平台。 BRAND 使用 Redis [1] 在节点之间发送数据,从而实现快速的进程间通信 (IPC)、对 54 种编程语言的支持以及跨多台计算机的分布式处理。开发人员只需进行极少的实施更改,即可在 BRAND 中无缝部署现有的 ANN 模型。在初步测试中,BRAND 在发送大量数据(1024 个通道的 30 kHz 模拟神经数据,以 1 毫秒的块为单位)时实现了快速的 IPC 延迟(<500 微秒)。BCI 控制通过一个图表进行测试,该图表通过以太网接收 30 kHz 微电极阵列电压记录,过滤和阈值化输入以获取尖峰,将尖峰分成 10 毫秒的箱体,应用解码模型,并更新光标在显示屏上的位置。在系统的初步演示中,BrainGate2 临床试验 (NCT00912041) 的参与者 T11 在径向 8 中心向外光标控制任务中实现了 2.84 ± 0.83 秒(53 次试验)的目标获取时间,其中 30 kHz 信号处理、线性解码、任务控制和图形均在 BRAND 中执行。未来的实验将结合 ANN;为了对 ANN 延迟进行基准测试,我们运行了基于 PyTorch 的循环神经网络解码器(10 个隐藏单元、30 个箱输入序列)并测量了延迟(N = 30,000 个数据包)。对于此配置,从信号输入到解码器预测的端到端延迟始终小于 2 毫秒(图 1)。我们还验证了 BRAND 可以实时运行两种流行的神经群体动态模型——通过动态系统进行潜在因子分析 (LFADS) [2] 和神经数据转换器 (NDT) [3],使用其原始的 Tensorflow 和 PyTorch 实现,每 10 毫秒箱(256 通道数据)的延迟低于 6 毫秒。讨论:BRAND 支持低延迟 ANN 推理,同时提供与闭环 BCI 研究所需的数据采集、信号处理和任务代码的无缝集成。意义:BRAND 凭借其模块化设计和广泛的语言支持,简化了将计算模型从离线分析转换为闭环实验的过程,利用 ANN 的强大功能来改善多种环境下的 BCI 控制。致谢:这项工作得到了埃默里神经调节和技术创新中心 (ENTICe)、NSF NCS 1835364、DARPA PA-18-02-04-INI-FP-021、NIH Eunice Kennedy Shriver NICHD K12HD073945、NIH-NINDS/OD DP2NS127291、阿尔弗雷德 P.斯隆基金会、Burroughs Wellcome 基金会、作为西蒙斯-埃默里国际运动控制 (CP) 联盟一部分的西蒙斯基金会、NIH NINDS NS053603、NS074044 (LEM)、NIH NIBIB T32EB025816 (YHA)、NIH-NIDCD U01DC017844 和退伍军人事务部康复研究与发展服务 A2295R (LRH) 的支持。参考文献:[1] Redis https://redis.io/ 。[2] Pandarinath 等人,2018 年,Nat Methods doi:10.1038/s41592-018-0109-9。[3] Ye 和 Pandarinath,2021 年,神经元行为数据分析理论 doi:10.1101/2021.01.16。42695。