XiaoMi-AI文件搜索系统
World File Search System履带

多履带超导体中复合带的几何超流量
多梁超导体中孤立的平流的超流体重量包含频带量子公制的贡献和晶格几何术语,该晶格几何术语取决于晶格中的轨道位置。由于超流动性的重量是超导体能量弹力的量度,因此它与晶格几何形状无关,导致频带的最小量子指标[phys [phys]。修订版b 106,014518(2022)]。在这里,开发了一种扰动方法来研究复合带的超流体重量及其晶格几何依赖性。当所有轨道表现出均匀的配对时,量子几何项包含每个频段的贡献和复合材料中每对频段之间的带间贡献。基于频带表示分析,它们为隔离的平流复合物的超级流体重量提供了拓扑下限。使用这种扰动方法,获得了晶格几何贡献的分析表达。它以Bloch函数的形式表示,提供了一个方便的公式,以计算多纤维超导体的超级流体重量。



D6R 系列 III 履带式推土机的规格,AEHQ5655,10198172.qxd
差速转向系统。差速转向在转弯时保持对两条履带的动力。当一条履带加速而另一条履带减速相同量时,拖拉机转弯。操作员可以同时转向和控制变速箱,这可以在某些应用中减少循环时间。差速转向舵杆具有用于升档和降档的触摸换档按钮。舵杆本身可以轻松向前或向后旋转以改变相应的拖拉机方向。向前移动可将拖拉机转向左侧,向后拉可向右移动。低舵杆力确保操作员在长时间换档期间感到舒适。大型铲刀负载可以绕过建筑物、桥台、树木或其他障碍物。转向调制也针对这些应用中的精确控制进行了优化。由于两条履带在转弯时均有动力,因此在陡坡上的软地面条件下可以实现更大的负载能力、功率和速度控制。
国防局履带车辆柴油发动机标准负载测试方法 N D S D ...
( mi n -1 ) ( N) ( N・m) ( kW) ( ℃) ( ℃) ( ℃) ( kPa) g ( s) ( g/h) ( ℃) ( g/kWh) ( N·m) ( kW) ( g/kWh) ( ℃) ( ℃) ( kPa) ( ℃) ( %)
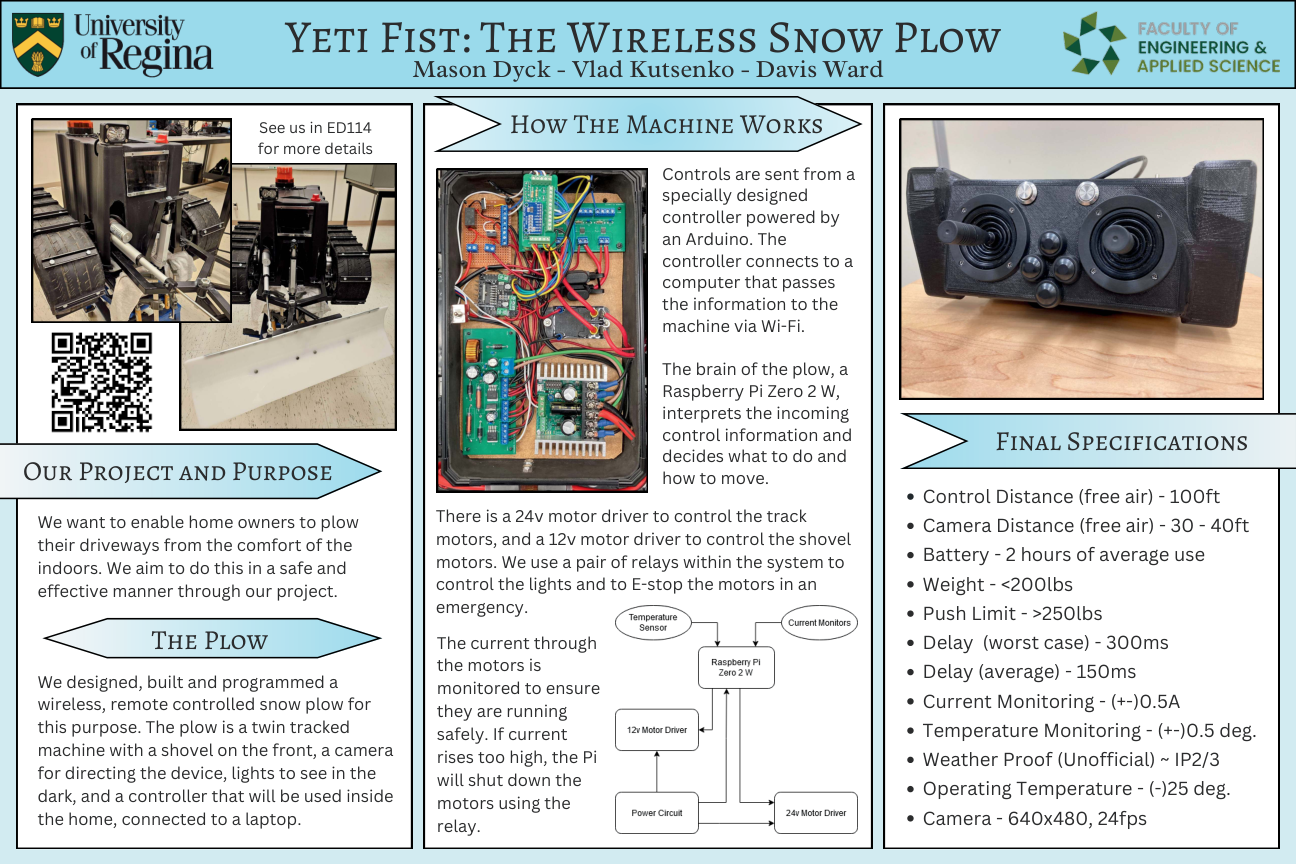
Yeti Fist:无线扫雪机
为此,我们设计、制造并编程了一款无线遥控除雪机。这款除雪机是双履带机器,前面有铲子,还有用于控制设备的摄像头、可在黑暗中看清的灯光以及可在家中使用的控制器(与笔记本电脑相连)。

上士 James A. Jett Jr. 高级士兵顾问
MSG Jett 的军事和民事教育包括战斗参谋士官课程、高级领导课程、安全部队援助课程、全球支援作战系统-陆军维护主管课程、民事领导基础课程、维护检查员认证课程、额外值班安全官、附带值班安全官课程、管理人员安全课程、战斗安全官课程、指挥官安全课程、行动官员发展课程、履带车辆恢复课程、轮式车辆恢复课程、轮式车辆修理工、初级领导力发展课程、履带车辆机械师基础士官课程、军械高级领导课程、第 81 战备师物理安全培训和主管发展课程。MSG Jett 目前持有阿拉巴马州的 A 级商业驾驶执照,并持有船舶和摩托车驾驶执照。

日野 268 G + Wayne Royal GT10 垃圾车
日野 268 G + Wayne Royal GT10 垃圾车 总长度 23.467 英尺 总宽度 8.025 英尺 总车身高度 10.485 英尺 最小车身离地间隙 1.315 英尺 履带宽度 8.025 英尺 锁止时间 6.00 秒 路缘转弯半径 21.100 英尺
Volvo-EC18E-手册.pdf
环保驾驶 ................................................. 92 全身振动 ................................................. 93 挖掘规则 ................................................. 95 在危险区域内作业 ........................................ 96 附件 .............................................................. 106 附件、连接和断开 ........................................ 108 附件支架 ...................................................... 109 液压附件支架 ........................................ 112 压力释放 ...................................................... 114 铲斗 ............................................................. 115 偏置动臂 ...................................................... 116 特殊液压系统 ................................................ 118 破碎锤 ............................................................. 119 软管破裂阀 ........................................................ 125 履带 ............................................................. 126 起重物体 ........................................................ 127 信号图 ............................................................. 132 维修时的安全 ................................................ 135