XiaoMi-AI文件搜索系统
World File Search System山脊
2023 年沿海总体规划候选项目清单和地图
普拉克明县的综合项目,涵盖密西西比河两岸的特色。在约 28,000 英亩的土地上创造沼泽,包括填充深度超过 2.5 英尺的区域,并创造新的湿地栖息地,恢复退化的沼泽并减少波浪侵蚀。恢复巴拉塔里亚盆地的大河口山脊和大河口利亚德山脊。七个 2000 立方英尺/秒容量的泵虹吸管从 MR 输送到邻近湿地和威尼斯、布斯维尔、帝国、热带弯道、鹿岭运河、菲尼克斯和杜邦河湾的河道清理区(12 月 1 日至 4 月 30 日运营。当密西西比河流量等于 750,000 立方英尺/秒时,每个泵虹吸管的流量为 2,000 立方英尺/秒;对于 300,000 立方英尺/秒和 750,000 立方英尺/秒之间的河流流量,使用从 0 到 2,000 立方英尺/秒的线性函数计算可变流量;对于 750,000 立方英尺/秒以上的河流流量,流量恒定为 2,000 立方英尺/秒。低于 300,000 立方英尺/秒时不运行)

土地和资源管理计划 - 美国农业部林务局
本规划随附的地图主要为说明性质,必须与本规划中包含的书面说明结合使用。虽然尽可能使用合乎逻辑且易于识别的边界(道路、山脊等),但必须认识到地图比例固有的准确性和精确度限制。例如,只有 200 英尺宽的河岸保护区或走廊不会出现在规划地图上。但是,当在现场识别这些区域时,将适用河岸保护区的标准和指南,即处方 IX。
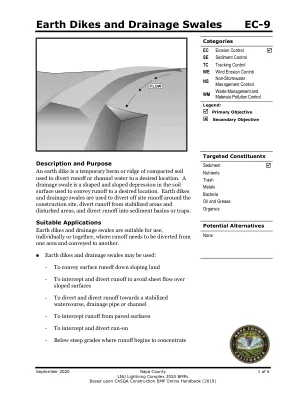
地球堤防和排水Swales EC-9
斜率应通过径流保护侵蚀。临时排水牛和斜坡顶部的土堤的组合可以将径流转移到一个可以将其带到坡度底部的位置(请参阅EC-11,斜坡排水口)。组合堤防和牛the很容易通过推土机或毕业生的单个传球来构造,并通过山脊上的轨道或车轮的第二次通过。最初分级时应安装转移结构,并保留在适当的位置,直到安装后BMP并稳定斜率为止。

TC 3-04.4 飞行基础
图 3-3。深度感知 ...................................................................................................... 3-9 图 3-4。世界上的沙漠地区 ...................................................................................... 3-13 图 3-5。沙质沙漠地形 ............................................................................................. 3-14 图 3-6。岩石高原沙漠地形 ...................................................................................... 3-15 图 3-7。山地沙漠地形 ............................................................................................. 3-15 图 3-8。世界上的丛林地区 ............................................................................................. 3-20 图 3-9。风的类型 ............................................................................................. 3-25 图 3-10。微风 ............................................................................................................. 3-25 图 3-11。中等风 ................................................................................................ 3-26 图 3-12。强风 ................................................................................................ 3-26 图 3-13。山波(驻波) ................................................................................ 3-27 图 3-14。与山波相关的云层形成 ............................................................. 3-28 图 3-15。转子流动湍流 ................................................................................ 3-28 图 3-16。风过山脊 ............................................................................................. 3-29 图 3-17。蛇形山脊 ............................................................................................. 3-30 图 3-18。风过树冠 ............................................................................................. 3-30 图 3-19。肩部风 ................................................................................................ 3-31 图 3-20。穿越峡谷的风 ........................................................................................ 3-31 图 3-21。山地起飞 ............................................................................................. 3-32 图 3-22。高空侦察飞行模式 ............................................................................. 3-35 图 3-23。使用圆形机动计算风向 ............................................................. 3-37 图 3-25。计算两点之间的风向 ................................................................................ 3-36 图 3-24。进近路径和要避开的区域 .............................................................................. 3-38 图 3-26。贴地或等高线起飞(地形飞行) ...................................................................... 3-40 图 3-27。以 45 度角穿越山脊(地形飞行) ...................................................................... 3-41 图 3-28。在地形飞行高度进行大转弯或爬升 ............................................................................. 3-41 图 3-29。沿山谷飞行(地形飞行) ............................................................................. 3-42 图 3-30。贴地或等高线进近(地形飞行) ...................................................................... 3-43 图 4-1。座舱照明 ...................................................................................................... 4-2 图 4-2。光照水平 ...................................................................................................... 4-3 图 4-3。明视觉 ...................................................................................................... 4-4 图 4-4。中视觉 ...................................................................................................... 4-4 图 4-5。暗视觉 ...................................................................................................... 4-5 图 4-6。白天盲点 ...................................................................................................... 4-5 图 4-7。夜间盲点 ...................................................................................................... 4-6 图 4-8。传感器可以看到什么................................................................................................ 4-6 图 4-9。图像增强器 ...................................................................................................... 4-7 图 4-10。飞行员夜视成像系统操作顺序 ...................................................................... 4-8 图 4-11。微通道板 ...................................................................................................... 4-8 图 4-12。荧光屏 ...................................................................................................... 4-8 图 4-13。光晕效应 ...................................................................................................... 4-9 图 4-14。配重 ...................................................................................................... 4-9 图 4-15。热传感器................................................................................................ 4-11 图 4-16。大气效应............................................................................................... 4-12

碎石雪崩丘的形态分析......
图 5:研究区域提取的丘陵地图(n = 65)。蓝色至紫色显示逆向 DEM 上的洼地填充区域,指示局部丘陵和山脊的位置。黑色实线表示已识别丘陵的丘陵边界。请注意,根据对正射影像和实地观察的解释,并非所有洼地填充区域都被识别为丘陵。山体阴影图像来自 RPAS 得出的 36 厘米 DEM(前景)和 10 米 PRISM-DEM 5

至少有sgd的隐式正规化的好处...
随机梯度下降(SGD)在实践中表现出强大的算法正则化效率,该算法在现代机器学习方法的概括中起着重要作用。在这项工作中,我们试图在线性回归的更简单设置(包括众多和参数化的政权)中理解这些问题,我们的目标是对(未注册)平均SGD与Ridge Regres-Sion的显式正规化提供(未注册的)平均SGD的隐性正规化比较。对于一系列最小二乘问题实例(在高维度中是自然的),我们显示:(1)对于每个问题实例和eviry Ridge参数((未进行定制)SGD),当在对数上提供的样品提供的样本比提供给山脊算法更糟糕的ridge songe(提供的常量)的样本(概括)不变的步骤(概括了SGD的常数)(概括) (2)相反,存在最佳调整的山脊回归需要的样本比SGD更多的样本以具有相同的概括性能。总的来说,我们的结果表明,到对数因素,SGD的概括性能总是不比Ridge回归的多种过度参数化的问题差,实际上,对于某些问题实例来说可能会更好。更普遍地,我们的结果表明,即使在更简单(过度参数化)凸设置中,算法正则化如何产生重要的后果。

Molonglo Group Center和包围草案概念计划
坐落在Molonglo河走廊的上坡上,莫隆洛山谷周围环绕着国家植物园,伯利·格里芬湖,黑山,国家动物园和水族馆,以及布伦和布林德贝拉的西部范围。Molonglo Valley由一个独特的地形定义,其中主要的山脊线与周围的现有开发项目分开,Belconnen向北(Pinnacles,Mount Painter和Black Mountain),东部(奶牛场山和国家植物园)和南部的Stromlo Forest Park。
市政法规:19.73.110 夜间照明
违反,主任或其指定人应通过亲自送达或挂号信(要求回执)的方式向该场所的业主和/或占用人发出通知,要求其在亲自送达或邮寄通知之日起 30 天内消除违规行为。规划和开发服务人员应随时协助与违规者合作纠正违规行为。如果违规行为未在 30 天内消除,主任或其指定人或指定人可提起法律或公平诉讼,以禁止、限制或消除任何违反本章的行为,并对此类违规行为处以罚款。2. 山坡、山脊线和特殊情况

报告(PDF)
根据现在普遍接受的板块建筑学理论的,夏威夷火山主义归因于岩浆的产生和上升,因为太平洋岩石圈板块在固定的或至少较慢的移动,融化异常(“夏威夷热点”)上,在Asthensophere(例如,Wilson,1963年); 1963年; Dalall和其他1979年,麦克马式板板; Dalrymple,1987年,1989年)。 首先是北部太平洋板块的渐进式运动超过7500万年,这使夏威夷山脊 - 佩奇 - 佩奇岛的海底在太平洋海上跨越了6,000公里长的火山,每座火山连续地从泥土中脱离了“热点斑点”和一个新的Volcano Grew。 根据该模型,目前活跃的夏威夷火山Kilauea,Mauna Loa,也许还有Loihi,即距离约30英里的潜艇火山,夏威夷火山主义归因于岩浆的产生和上升,因为太平洋岩石圈板块在固定的或至少较慢的移动,融化异常(“夏威夷热点”)上,在Asthensophere(例如,Wilson,1963年); 1963年; Dalall和其他1979年,麦克马式板板; Dalrymple,1987年,1989年)。首先是北部太平洋板块的渐进式运动超过7500万年,这使夏威夷山脊 - 佩奇 - 佩奇岛的海底在太平洋海上跨越了6,000公里长的火山,每座火山连续地从泥土中脱离了“热点斑点”和一个新的Volcano Grew。根据该模型,目前活跃的夏威夷火山Kilauea,Mauna Loa,也许还有Loihi,即距离
拟议的船员山开发遗产评估2023
较高的地面从北部和西部倾斜至李谷的相对平坦的山谷地板(如图2所示,相对)。这个更高的地面可从西方跨自治市镇进行长远的看法。许多历史悠久的道路都遵循这些高山脊,例如南北山脊和南北埃尔明路(现在是托特纳姆热刺路(Totterham High Road),这是一条可连接伦敦与约克(York)建造的罗马路)。早期定居点出现在这一更高的一轮中,并成长为较大的中世纪定居点,例如植物学湾和奥克伍德。它们被浅山谷散布,这些山谷穿过向东流入李河的小溪流中的山丘。这些溪流是景观中的独特特征,今天通常与林地内的路径或作为开放式农村景观中的关键特征保持在一起。在特伦特公园(Trent Park)的东部,鲑鱼布鲁克(Salmon's Brook)遇到了梅里希尔斯(Merryhills)布鲁克(Merryhills Brook),跌落在布拉姆利路(Bramley Road)下,最终加入了托特纳姆(Totterham Hale)的李河。库夫利溪(Cuffley Brook)北部的船员山(Cuffley Brook)向南流动,并由西部的北河(Northaw)布鲁克(Northaw Brook)从西部加入,而土耳其溪流则通过丘陵田野公园(Hilly Fields Park)的最低点,并为开放空间的性格和享受做出了贡献。的确,恩菲尔德的水道比其他任何伦敦自治市镇都多。